



















5 - 17
5 PARAMETERS FOR POSITIONING CONTROL
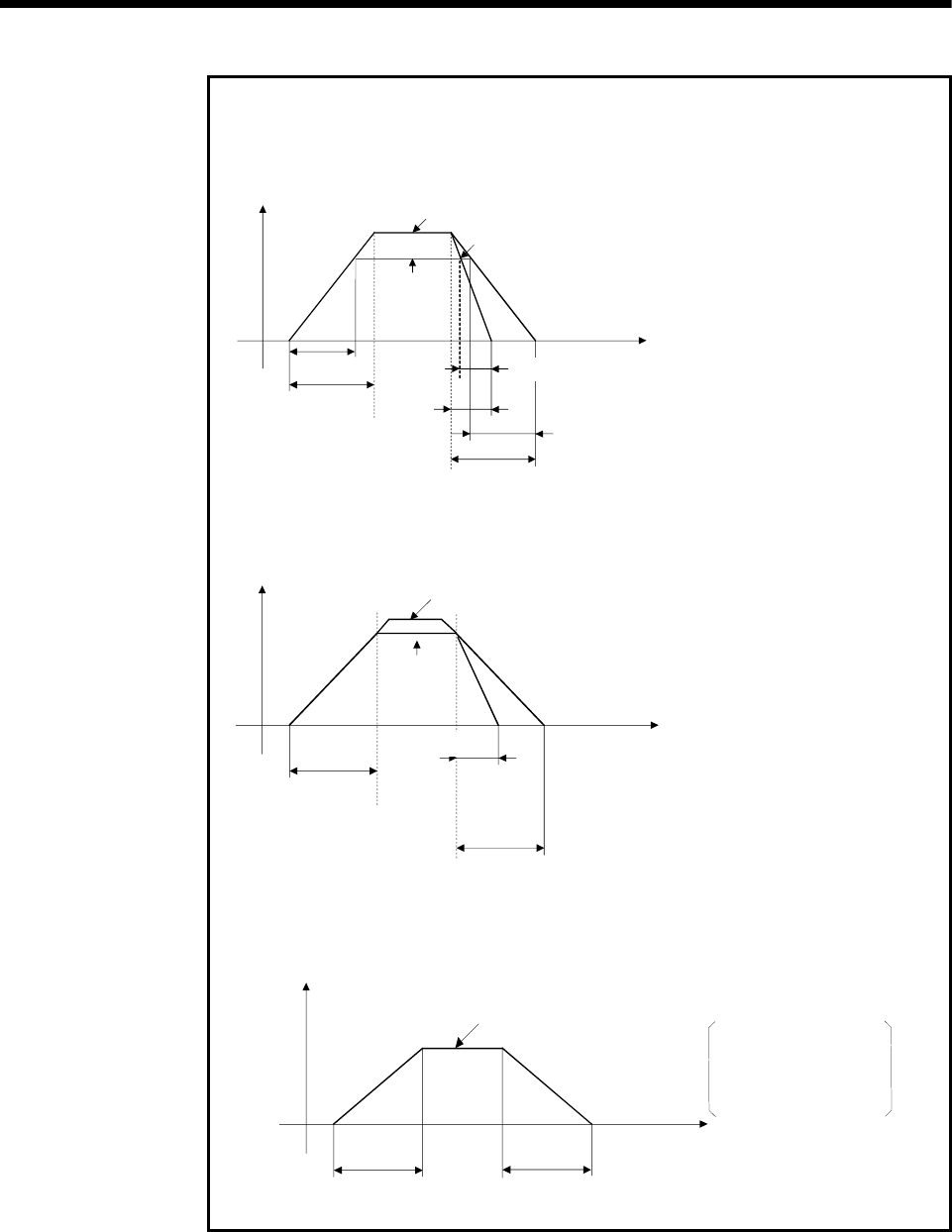
(1) Acceleration-fixed acceleration/deceleration system
(a) G01, G02, G03, G12, G13 or G32 during G101 execution
Speed
1) Real accele-
ration time
Set acceleration
time
Speed limit value
Positioning
speed set in
the Motion
program
2) Real rapid stop
deceleration time
Rapid stop cause occurrence
Set rapid stop
deceleration
time
Set deceleration time
3) Real deceleration time
Time
Real acceleration time
Time take to reach the positioning speed
set in the Motion program.
Real rapid stop deceleration time
Time taken to effect a rapid stop from the
positioning speed set in the Motion program.
Real deceleration time
Time taken to stop from the positioning
speed set in the Motion program.
1)
2)
3)
(b) G00 (without M-code), G28 (high-speed home position return), G30, G53 or
G00 including M-code during G101 execution
High-speed
feed rate
Real acceleration time
At the override of 100[%], it is equal to the
setting acceleration time.
Real rapid stop deceleration time
At the override of 100[%], it is equal to the
setting rapid stop deceleration time.
Real deceleration time
At the override of 100[%], it is equal to the
setting deceleration time.
1)
2)
3)
Speed
1) Real accele-
ration time
Set acceleration
time
Speed limit value
2) Real rapid stop
deceleration time
Set rapid stop
deceleration
time
Set deceleration time
3) Real deceleration time
Time
(2) Time-fixed acceleration/deceleration system
(a) G00 including M-code during G100 execution (default), G01, G02, G03, G12,
G13 or G32
Positioning speed
Set acceleration
time
Set acceleration
time
Time
Acceleration/deceleration time
is constant regardless of
positioning speed.
(Always acceleration time)
Deceleration time and rapid stop
time are ignored.
Speed
Fig. 5.4 Relationships between the speed limit value, acceleration time,
deceleration time and rapid stop deceleration time