

















4 - 16
4 POSITIONING SIGNALS
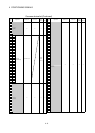
(3) In-position signal (M2402+20n)
(a) This signal turns on when the number of droop pulses in the deviation
counter becomes below the "in-position range" set in the servo parameters.
It turns off at the start.
[Motion program exapmle]
O0001;
G90 G00 X100. ;
X200. ;
M02;
%
Program No.
Absolute value command PTP positioning (X100.)
PTP positioning (X200.)
Reset
In-position range
Start accept flag (M2001+n)
In-position signal (M2402+20n)
OFF
ON
Automatic start signal
(M4002+10n)
Motion program (Axis
designation program) start
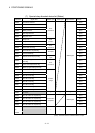
(b) An in-position check is performed in the following cases.
• When the servo power supply is turned on.
• After the automatic deceleration is started during positioning control.
• After the deceleration is started with the JOG start signal OFF.
• During the manual pulse generator operation.
• After the proximity dog ON during a home position return.
• After the deceleration is started with the stop command.
• When the speed change to a speed "0" is executed.
• After the deceleration is started with the temporary stop command.
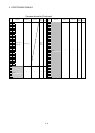
POINT
• If in-position range is longer than the deceleration distance, refer to the following
case.
Start accept flag(M2001+n)
In-position signal (M2402+20n)
In-position
range
(Note)
Motion program (Axis
designation program) start
(Note) : If in-position range is longer than the deceleration distance,
in-position signal turns on after deceleration start.