



















6 - 152
6 MOTION PROGRAMS FOR POSITIONING CONTROL
[Program Example]
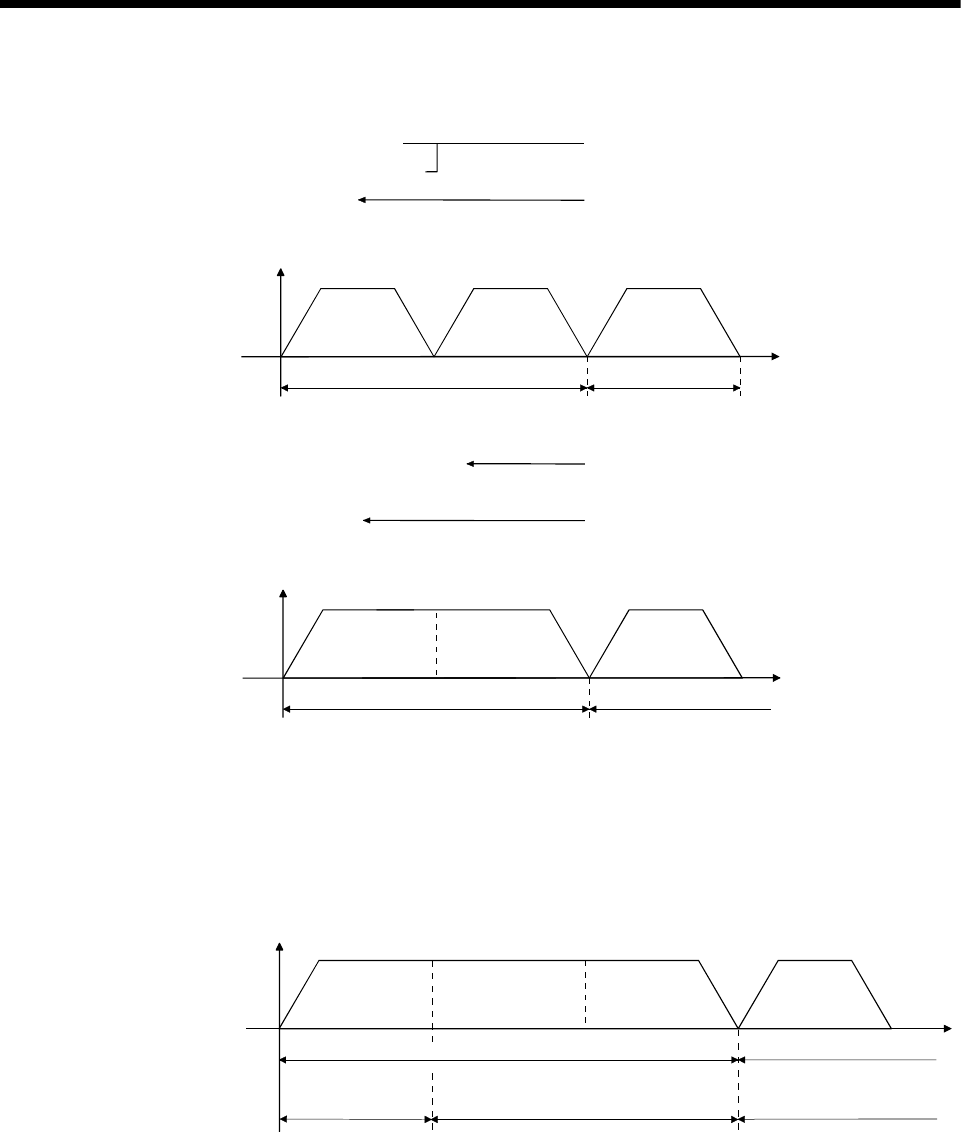
(1) When a parameter block change is executed during point-to-point positioning
N01 G00 X0. ;
N02 G00 X100. ;
N03 PB3 ;
N04 G00 X300. ;
Uses the parameter block at a program start.
Changes to parameter block 3.
N04
PB at a program start is used. PB3 is used.
N02N01
t
V
(2) When a parameter block change is executed during constant-speed positioning
N01 G01 X0. F200. ;
N02 G01 X100. ;
N03 PB5 ;
N04 G01 X200.;
Uses the parameter block at a program start.
Changes to parameter block 5.
N01 N02 N04
PB at a program start is used. PB5 is used.
V
t
(3) When torque limit value is being changed
N01 G01 X0. F200. ;
N02 G01 X100. TL300 ;
N03 G01 X200. ;
N04 PB10 ;
N05 G01 X300. ;
Torque limit value
within PB at a
program start
N01 N02 N03 N05
Torque limit value 300[%]
Torque limit value within PB10
PB at a program start is used. PB10 is used.
t
V