


















2 - 4
2 POSITIONING CONTROL BY THE MOTION CPU
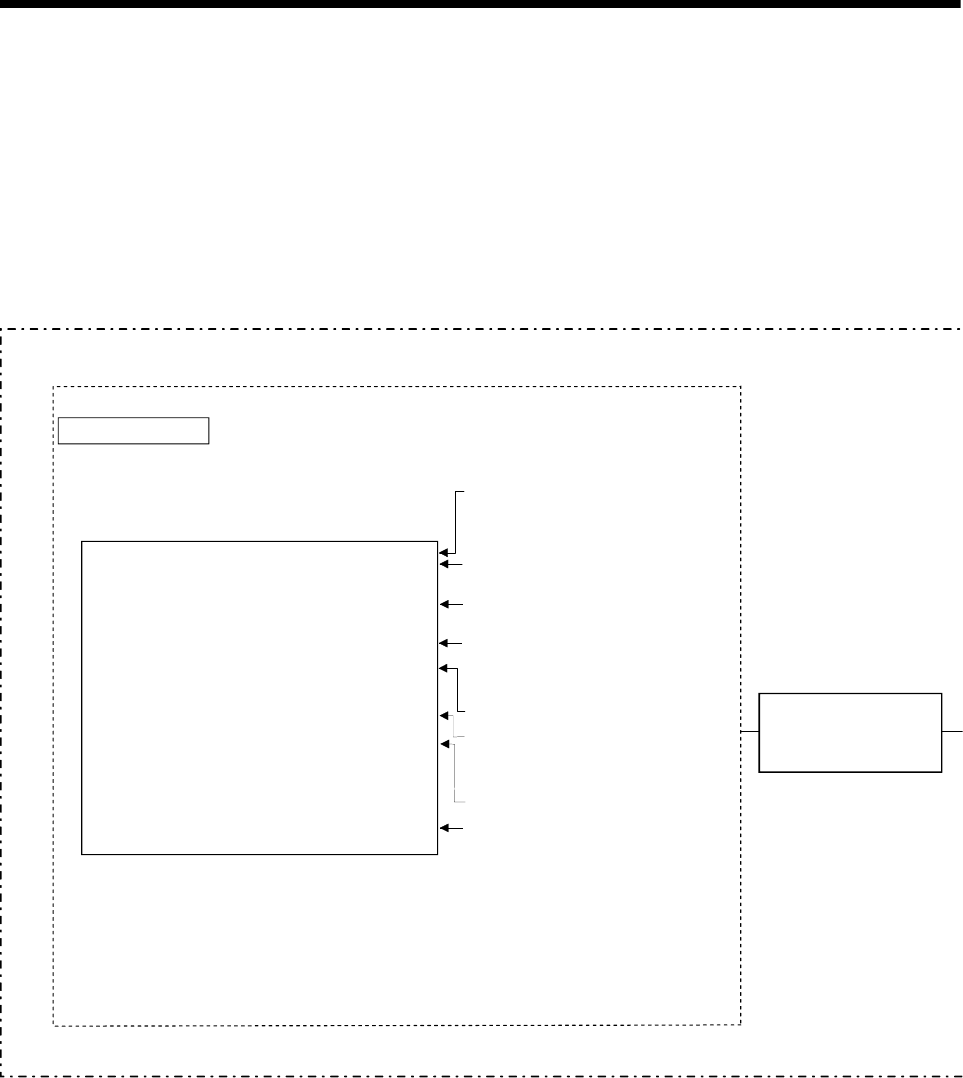
[Execution of the JOG operation]
JOG operation of specified axis is executed using the Motion program in
the Motion CPU. JOG operation can also be executed by controlling the JOG
dedicated device of specified axis.
An overview of JOG operation is shown below.
Motion CPU control system
Program end instruction
Program ends.
Motion program . . . . .
O100;
SET #M2042;
N10 IF[[ON #M2415] AND [ON #M2435]] GOTO 20;
GOTO 10;
N20 #D640 = 100000;
#D642L = 100000;
IF [[ON #X003] AND [OFF #M3203]] THEN 1;
SET #M3202;
ELSE 1;
RST #M3202;
END 1;
IF [[ON #X004] AND [OFF #M3202]] THEN 2;
SET #M3203;
ELSE 2;
RST #M3203;
END 2;
.
.
.
N80 M02;
%
Motion program No.100
(Program No. specified with the
S(P).SFCS instruction.)
Program control function instruction
The flow of execute program is
controlled by conditions.
Create and correct using a peripheral device
(Note-1)
JOG operation by
the JOG dedicated
device control
All axes servo ON command turns on.
Transfer the JOG operation speed to
D640L and D642L.
1 axis forward rotation command
SET/RST
Program control function instruction
The flow of execute program is
controlled by conditions.
1 axis reverse rotation command
SET/RST
(1) Set the positioning control parameters using a peripheral device.
(2) Set the JOG speed to the JOG speed setting register for each axis using the
Motion program.
(3) Perform the JOG operation while the JOG start command signal is ON in the
Motion program.