



















5 - 3
5 PARAMETERS FOR POSITIONING CONTROL
5.2.1 Number of pulses/travel value per rotation
The "Electronic gear function" adjusts the pulse calculated and output by the parameter
set in the Q173HCPU/Q172HCPU and the real travel value of machine.
It is defined by the "Number of pulses per rotation" and "Travel value per revolution".
POINTS
(1) The mechanical system error of the command travel value and real travel value
is rectified by adjustment the "electronic gear".
(2) The value of less than 1 pulse that cannot be execute a pulse output when the
machine travels is incremented in the Q173HCPU/Q172HCPU, and a total
incremented pulse output is performed when the total incremented value
becomes more than 1 pulse.
(3) The total incremented value of less than 1 pulse that cannot be execute a pulse
output is cleared and it is referred to as "0" at the home position return
completion, current value change completion and start. (When the total
incremented value is cleared, the error occurs to the feed machine value only a
part to have been cleared.)
"Number of pulses/travel value per rotation" are shown below.
(1) Number of pulses/travel value per rotation
Number of pulses(AP)/travel value(AL) per rotation is an item which determines
how many rotations (number of pulses per rotation) of the servomotor in order to
make it a machine as the travel value ordered by the program.
The position control toward the servomotor is controlled with the number of
feedback pulses of the encoder connected to the servomotor in the servo
amplifier.
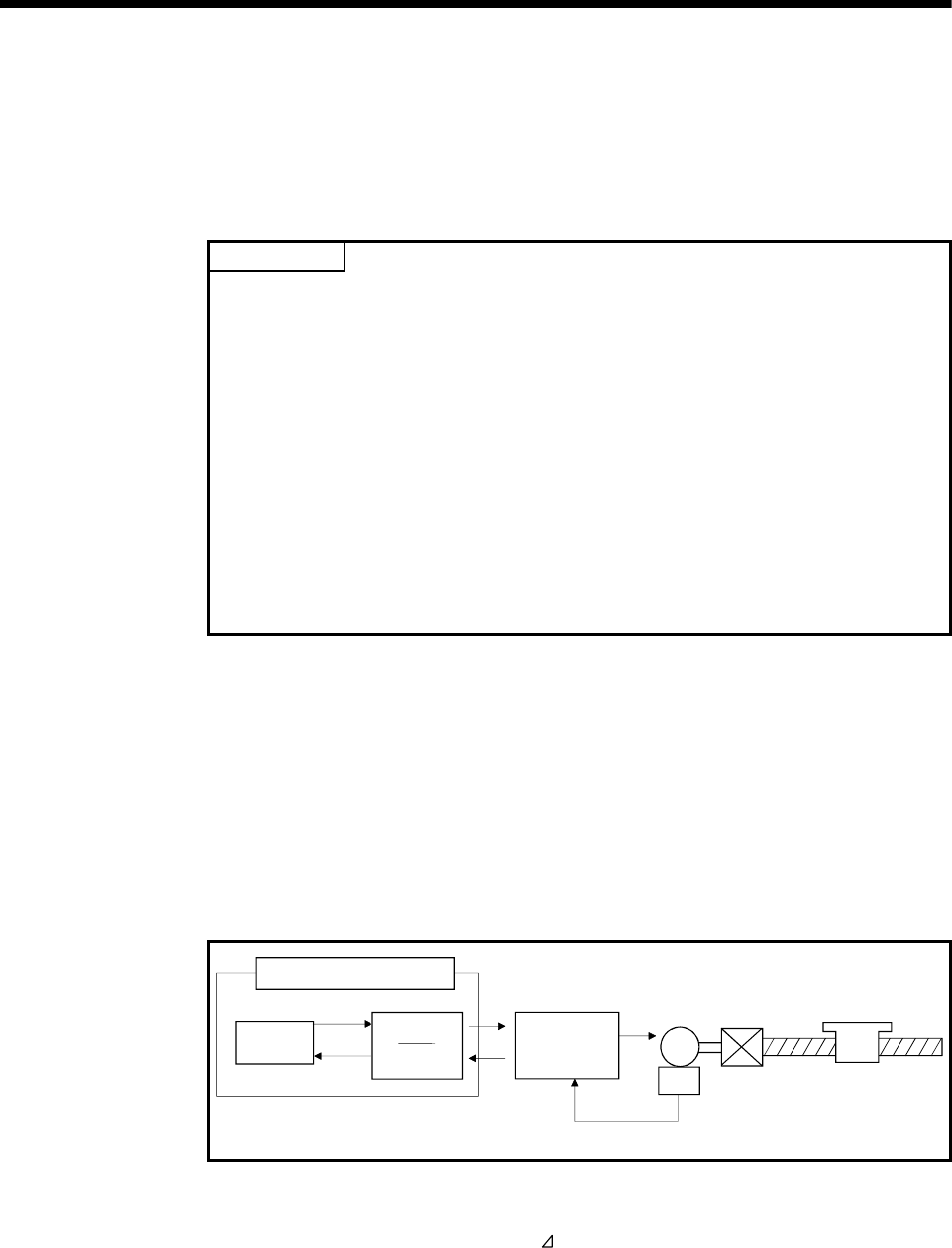
The control content of the Motion CPU is shown below.
M
Reduction gear
ENC
PLS
Servo amplifier
PLS
Feedback pulse
Command
value
PLS
AP
AL
Control
units
Q173HCPU/Q172HCPU
Machine
Fig. 5.1 Control content of the Motion CPU
For example, suppose that the servomotor was connected to the ball
screw. Because the travel value (
S) of machine per motor rotation is [mm] /
[inch] unit, the travel value (positioning address) set in the program is
commanded in [mm] / [inch] unit. However, the servomotor is positioning
controlled by the servo amplifier in pulse unit.