



















4 - 43
4 POSITIONING SIGNALS
POINTS
[The reasons for the servomotor travels minutely when the axis interlock signal turns
on at a Motion program start.]
Since the travel direction is judged at the positioning control in the Motion CPU,
only the first interpolation processing is executed. Therefore, the servomotor travels
minutely. This travel value is different in the acceleration-fixed
acceleration/decerelation (G101) and time-fixed acceleration/decerelation (G100).
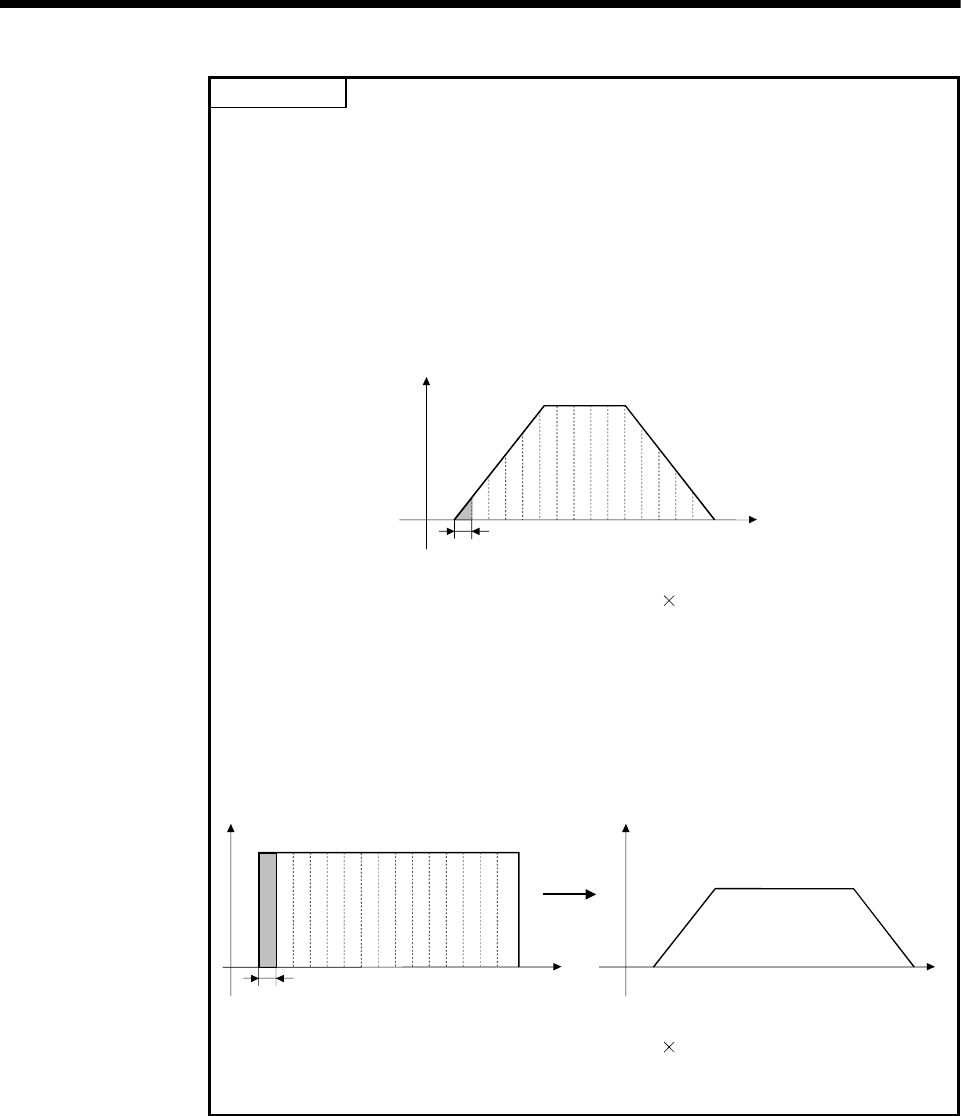
(1) Acceleration-fixed acceleration/decerelation (G101)
• The travel value of operation cycle (a part for 1 time of the beginning) is the
slash portion of the following figure.
V
Interpolation processing
t
Travel value
Operation c
y
cle
[Command speed 50m/min, Operation cycle 3.5ms]
Travel value for error detection = 50
0.0035/2/60
= 0.001mm
(2) Time-fixed acceleration/decerelation (G100)
• The travel value shown in a rectangle of following figure is divided into the
travel value for every operation cycle. Therefore, the travel value of operation
cycle (a part for 1 time of the beginning) for interpolation processing is the
slash portion of the following figure.
Interpolation processing
Travel value
V
t
Operation cycle
V
t
Time-fixed acceleration/deceleration processing
[Command speed 10m/min, Operation cycle 3.5ms]
Travel value for error detection = 50
0.0035/60
= 0.58mm