



















6 - 8
6 MOTION PROGRAMS FOR POSITIONING CONTROL
6.5 Control Instruction List
Control instructions used in the Motion program are shown below.
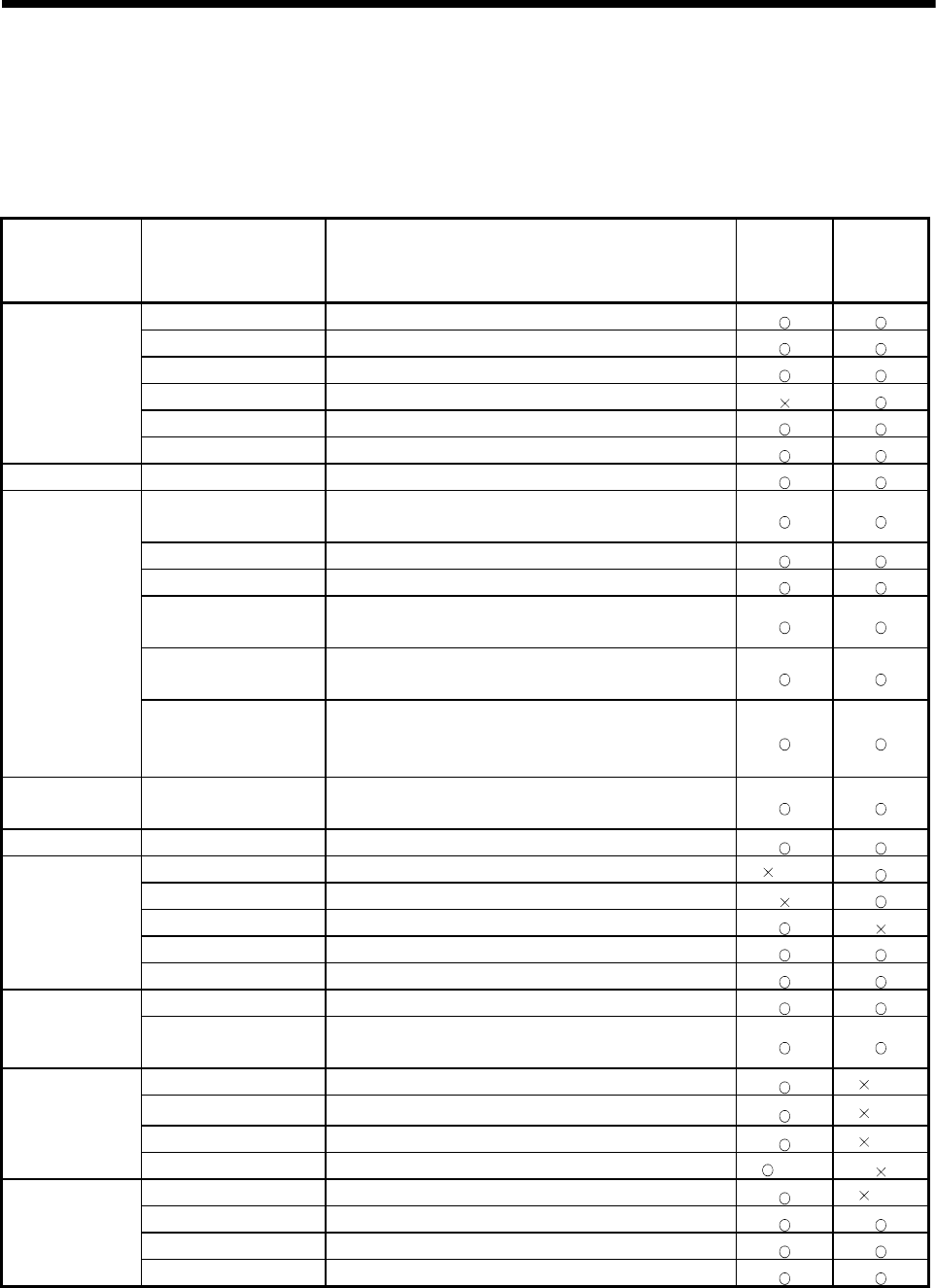
Control instruction list
Type Instruction Description
Control
program
Axis
designation
program
IF, GOTO Program control function
IF, THEN, ELSE, END Program control function
WHILE, DO Program control function
WAITON, WAITOFF Travel block wait function
EXEON, EXEOFF Block wait function
Control function
ON, OFF Conditional branch using bit device
Binary operation +, -, *, /, MOD, = Four fundamental operator, assignment statement
SIN, COS, TAN, ASIN,
ACOS, ATAN
Trigonometric function
INT Numerical conversion (real number to integer)
FLT Numerical conversion (integer to real number)
DFLT
32-bit real number data to 64-bit real number data
conversion
SFLT
64-bit real number data to 32-bit real number data
conversion
Standard function
SQRT, ABS, BIN,
BCD, LN, EXP, RSD,
FIX, FLP
Function
Logical operation
AND, OR, XOR, NOT,
<<, >>
Logical operator
Bit operation BSET, BRST Bit set and reset for word devices
PB Parameter block change
(Note-1)
TL Torque limit value change
CHGA Home position return
CHGV Speed change
Motion dedicated
function
CHGT Torque limit value change
SET, RST Bit device set, reset functions
Bit device
operation
IF, THEN,
SET/RST/OUT
Bit device operation on condition
CALL Program start
(Note-2)
GOSUB Program call 1
(Note-2)
GOSUBE Program call 2
(Note-2)
Program start,
end
CLEAR Control program end
(Note-3)
TIME Time to wait
(Note-4)
BMOV Block move (16 bit unit)
BDMOV Block move (32 bit unit)
Others
FMOV Identical data block move (16 bit unit)