



















5 - 4
5 PARAMETERS FOR POSITIONING CONTROL
Therefore, AP/AL is set so that the following expression of relations may be
materialized in order to convert the travel value of [mm] / [inch] unit set in the
program into a pulse.
Number of pulses per motor rotation = AP
Travel value of machine per motor rotation = AL
=
AP
AL
Electronic
gear
. . . . . (1)
(There is a range which can be set in the numerical value set as AP/AL, so it is
necessary to make the setting range of AP/AL the value calculated from the
above expression (reduced) of relations.)
Example of the real setting is shown below.
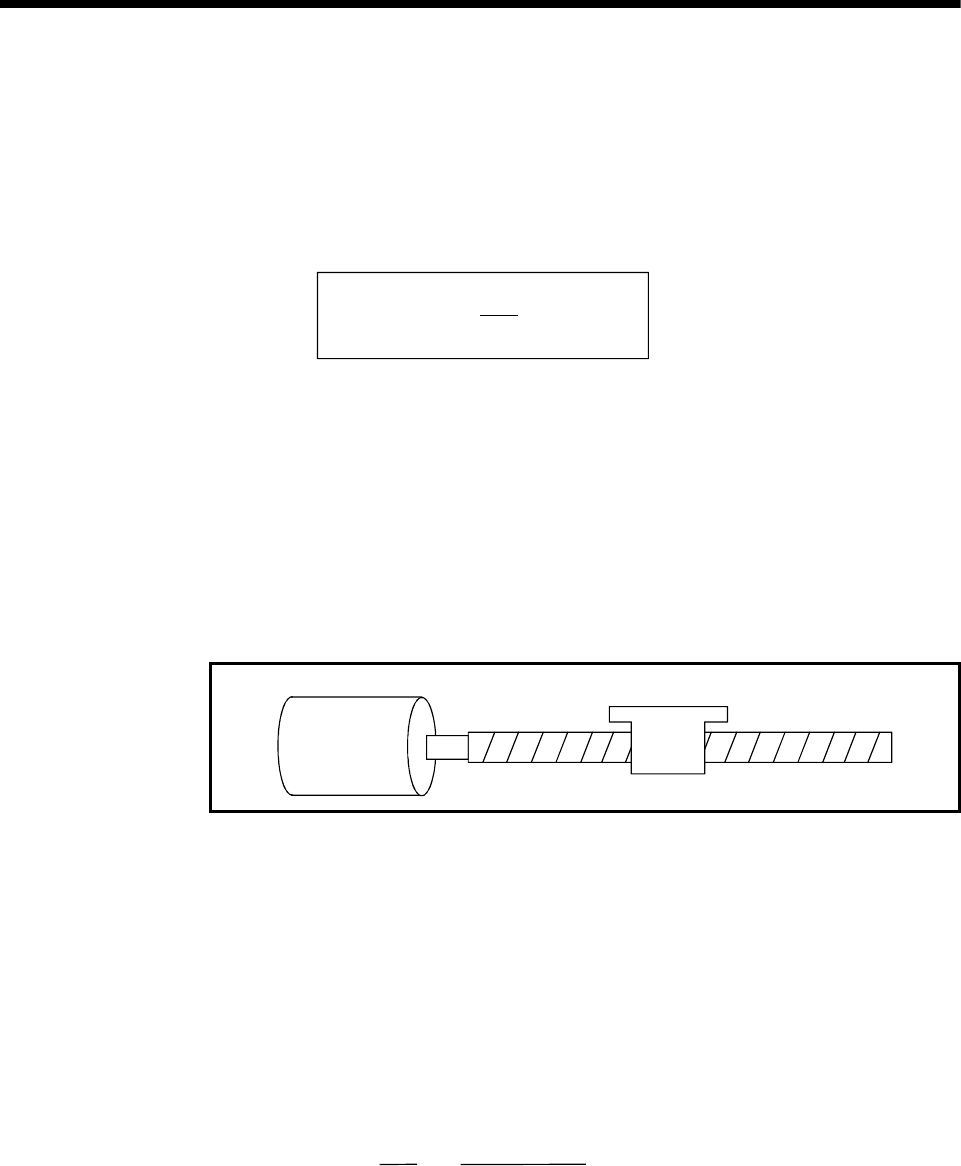
(a) For ball screw
When the ball screw pitch is 20 [mm], the servomotor is HF-KP
(262144[PLS/rev]) and direct connection (No reduction gear) is set.
Machine
Motor
Fig. 5.2 For ball screw
First, find how many millimeters the load (machine) will travel (AL)
when the servomotor runs for one rotation (AP).
AP (Number of pulses per motor rotation) = 262144 [PLS]
AL (Travel value of machine per rotation)
= Ball screw pitch × Reduction ratio
= 20 [mm]
Substitute this for the above expression (1).
=
AP
AL
262144 [PLS]
20 [mm]