



















7 - 21
7 AUXILIARY AND APPLIED FUNCTIONS
7.3.4 Home position return by the count type 1
[Control details]
(1) Count type 1
After the proximity dog ON, the zero point after the specified distance (travel
value after proximity dog ON) is home position in this method.
(If the proximity dog signal of servo amplifier is used, the count type 1 home
position return cannot be executed.)
When the zero point is not passed (zero pass signal: M2406+20n OFF) until it
travels the distance set in the "travel value after proximity dog ON" from home
position return start, an error will occur and home position return is not executed.
However, when "1 : Not need to pass motor Z phase after the power supply is
switched on" is selected in the "function selection C-4" of servo parameter
(expansion setting parameter), if the zero point is not passed until it travels the
distance set in the "travel value after proximity dog ON" from home position
return start, the home position return can be executed.
The travel value after proximity dog ON is set in the home position return data
(Refer to Section 7.3.1).
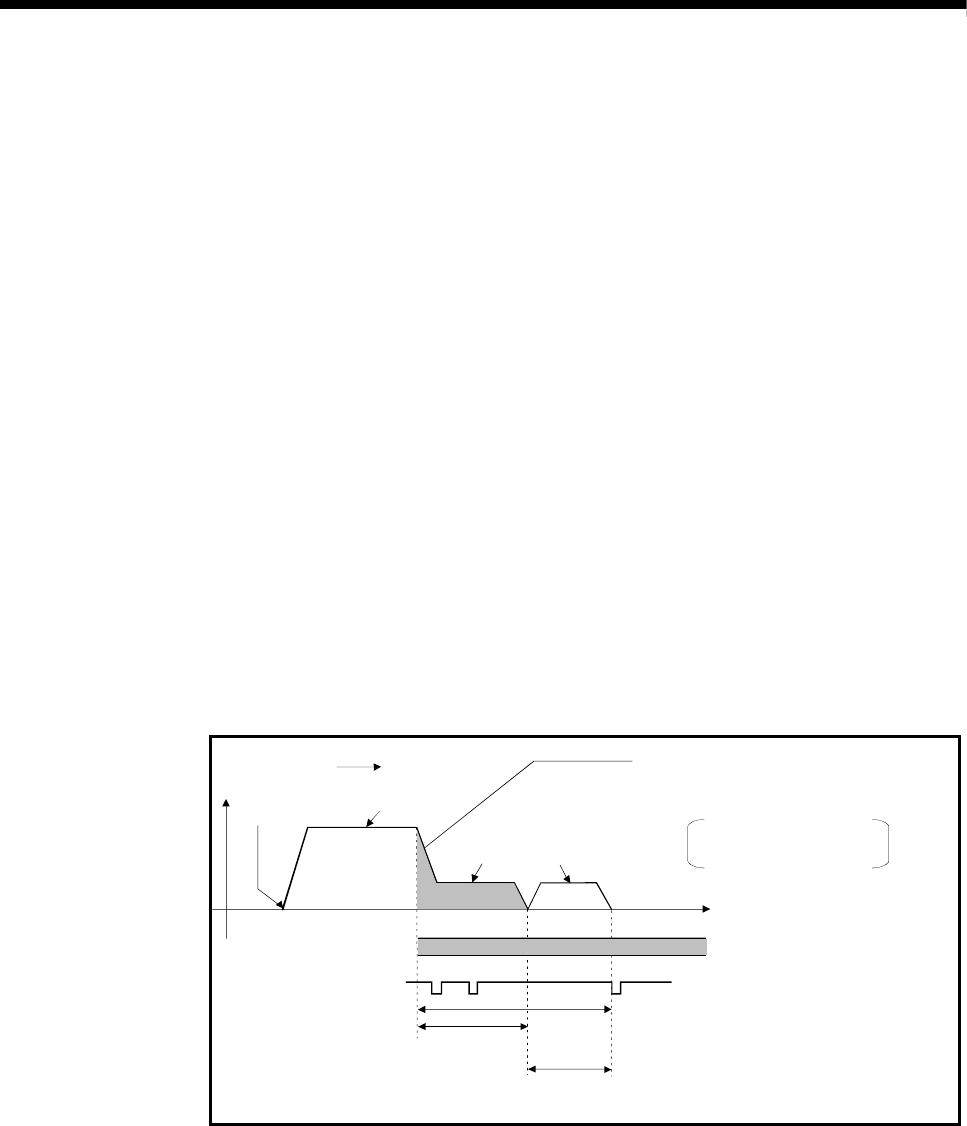
(2) Home position return by the count type 1
Operation of home position return by count type 1 for passing the distance set in
the "travel value after proximity dog ON" from the home position return start is
shown below.
t
V
ON
Creep speed
Home position
return start
Home position return
direction
Home position
return speed
Proximity dog
Zero point
(Note) : After the proximity dog ON, positioning of the
"travel value after proximity dog ON" of the
home position return data and the positioning
from the position to zero point.
"Travel value after
proximity dog ON"
of the home
position return
data.
The travel value in this range is stored in the monitor
register "travel value after proximity dog ON".
The travel value in this range is stored in the monitor
register "home position return re-travel value".
The distance to the zero point is
based on the servo data
Fig. 7.6 Home position return operation by the count type 1
(3) Home position return execution
Home position return by the count type 1 is executed using the CHGA instruction
in Section 7.3.16.
When the home position return request is ON, the count type 1 home position is
also made even G28 of the Motion program.