


















2 - 8
2 POSITIONING CONTROL BY THE MOTION CPU
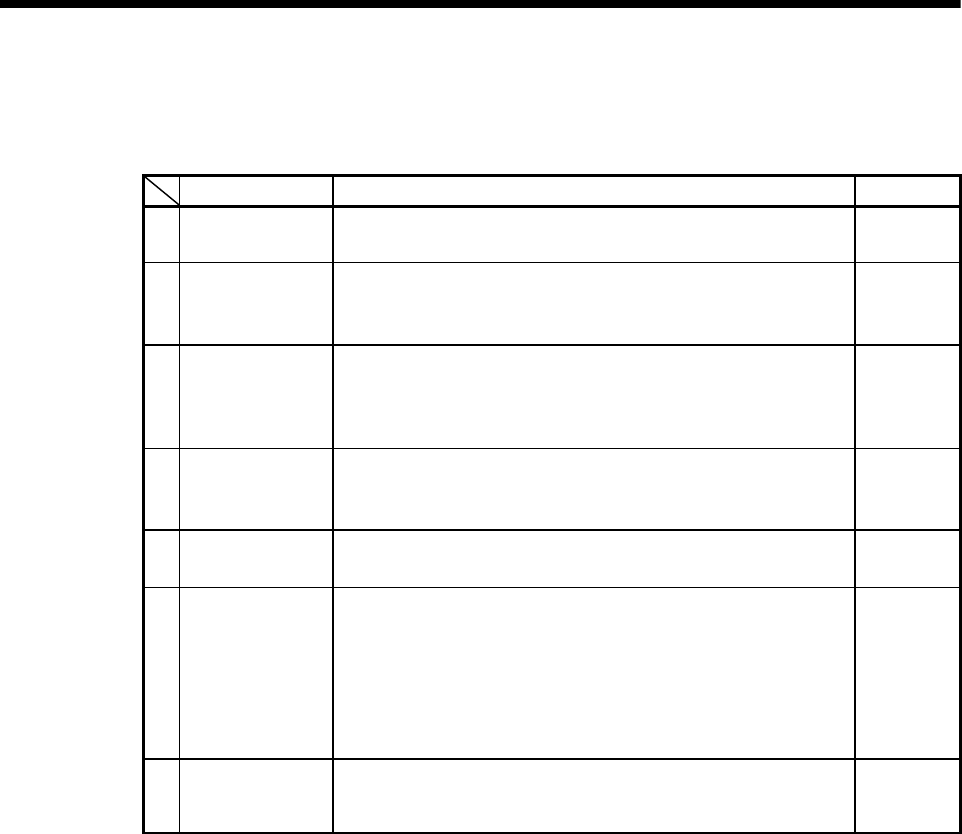
(1) Positioning control parameters
There are following seven types as positioning control parameters.
Parameter data can be set and corrected interactively using a peripheral device.
Item Description Reference
1 System settings
Multiple system settings, Motion modules and axis No., etc. are
set.
Section
5.1
2 Fixed parameters
Data by such as the mechanical system are set for every axis.
They are used for calculation of a command position at the
positioning control.
Section
5.2
3
Servo
parameters
Data by such as the servo amplifier and motor type with the
connected servomotor are set for every axis.
They are set to control the servomotors at the positioning
control.
(Note-1)
4
Home position
return data
Data such as the direction, method and speed of the home
position return used at the positioning control are set for every
axis.
Section
7.3.1
5
JOG operation
data
Data such as the JOG speed limit value and parameter block
No. used at the JOG operation are set for every axis.
Section
7.5.1
6 Parameter block
Data such as the acceleration/deceleration time and speed
control value at the positioning control are set up to 16
parameter blocks.
They are set with the servo program, JOG operation data and
home position return data, and it is used to change easily the
acceleration/deceleration processing (acceleration/deceleration
time and speed limit value) at the positioning control.
Section
5.3
7
Limit switch
output data
Output device, watch data, ON section, output enable/disable
bit and forced output bit used for the limit output function for
every limit output are set.
(Note-2)
(Note-1): Refer to Section 3.3 of the "Q173HCPU/Q172HCPU Motion controller Programming Manual
(COMMON)".
(Note-2): Refer to Section 4.1 of the "Q173HCPU/Q172HCPU Motion controller Programming Manual
(COMMON)".
(2) Motion program
The positioning control, JOG operation and manual pulse generator operation
are executed in the Motion program. The start request is performed using the
PLC program (S(P).SFCS/SVST instruction).
It comprises a Motion program No., G-code, M-code instruction and positioning
data.
Refer to Chapter 6 for details.
• Motion program No. ................
It is specified using the PLC program
(S(P).SFCS/SVST instruction).
• G-code, M-code instruction .....
It indicates the type of positioning control.
• Positioning data ......................
It is required to execute the G-code, M-code
instructions. The required data is fixed for
every G-code, M-code instruction.