



















E6581301
E-36
5
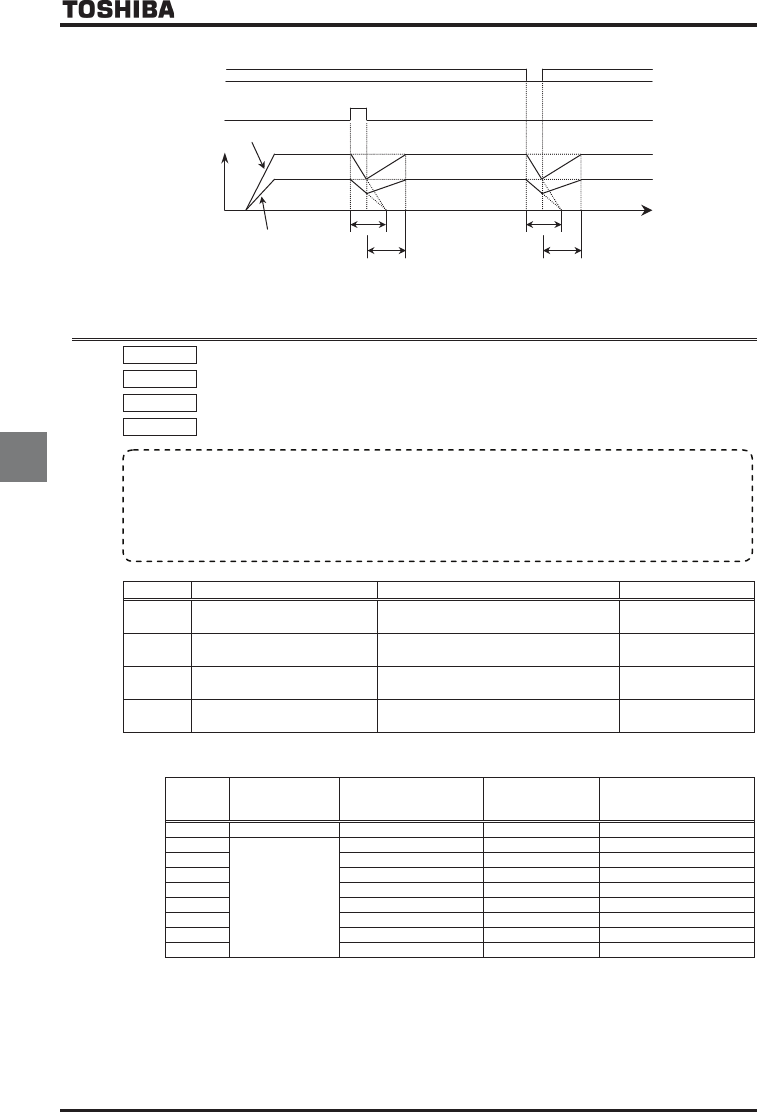
Motor speed
Time
Synchronized
acceleration/dece
leration signal
(S1 terminal)
H
Inverter 1
H
Inverter
2
ON
H
H
Input voltage
*1
*1:Even with WXE=,, functions are used, a motor may coast according to load conditions.
In this case, try to adjust the parameter "H" and "H".
5.19 Dynamic (regenerative) braking - For abrupt motor stop
RD
RDRD
RD
: Dynamic braking selection
RDT
RDTRDT
RDT
: Dynamic braking resistance
RDER
RDERRDER
RDER
: Dynamic braking resistor continuous capacity
H
HH
H
: Braking resistance overload time
[Parameter setting]
Title Function Adjustment range Default setting
RD Dynamic braking selection
:Disabled
~:Enabled
RDT Dynamic braking resistance ~
According to model
Refer to page K-48.
RDER
Dynamic braking resistRr
continuous capacity
~ kW
According to model
Refer to page K-48.
H
Braking resistance overload
time
~ sec.
* Protection levels defined by H (Refer to Section 6.14.2).
Note 1: The dynamic braking selection works on the following conditions.
Setting Braking function
Inverter trip condition
(The state of QNT trip
is excluded)
ST-off condition
Dynamic braking resistor
overload detect
Disabled - - -
Enabled
Enabled Enabled Protect
Enabled Enabled No Protection
Enabled Disabled Protect
Enabled Disabled No Protection
Disabled Enabled Protect
Disabled Enabled No Protection
Disabled Disabled Protect
Disabled Disabled No Protection
Note 2: The time set using H is the time for which the resistor sustains an overload. (Enter the time elapsed
before the inverter trips if a load 10 times as large as the dynamic braking resistor continuous capacity
specified using RDER is applied.) There is no need to change resistance settings recommended by Toshiba
(except DGP resistance setting).
Note 3: If the parameter RD is set to ~ (regenerative braking selected), the inverter will be set automatically so
as to deal with the regenerative energy from the motor by means of a resistor, without taking any action to
limit overcurrent. (The same function as H=)
Note 4: For inverters with ratings of 400V-200kW or more, set RD to ~ , because separate dynamic braking units
are not included as standard equipment.
• Function
Dynamic braking is used in the following cases:
1) Need to stop the motor quickly.
2) The inverter trips because of an overvoltage (OP) during deceleration.
3) Fluctuation of load condition causes a regenerative power even at a constant speed such as press machine.