















E6581301
11
K-30
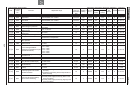
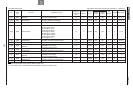
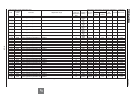
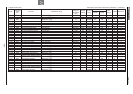
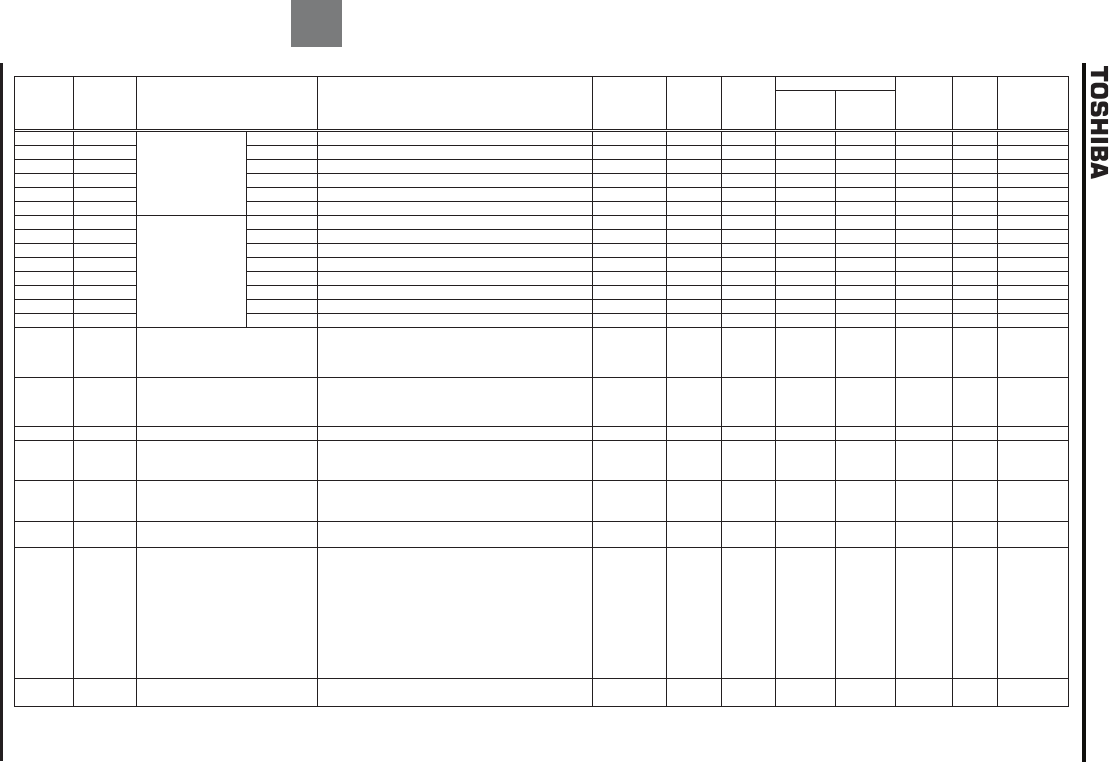
[29] Communication function [1/4] Sensorless vector/vector with sensor (Ɣ:Effective, -:Ineffective)
Title
Communi
cation
No.
Function Adjustment range
Minimum
setting unit
(Panel/Communi
cation)
Default
setting
Write during
running
Vector control
PM
control
V/f Constant
Reference
Speed
control
Torque
control
H
0784
MAC address
Data1
0~255
1/1
0
*1
Ɣ
/
Ɣ
Ɣ
/
Ɣ
Ɣ
Ɣ
*2
H
0785
Data2
0~255
1/1
0
*1
Ɣ
/
Ɣ
Ɣ
/
Ɣ
Ɣ
Ɣ
*2
H
0786
Data3
0~255
1/1
0
*1
Ɣ
/
Ɣ
Ɣ
/
Ɣ
Ɣ
Ɣ
*2
H
0787
Data4
0~255
1/1
0
*1
Ɣ
/
Ɣ
Ɣ
/
Ɣ
Ɣ
Ɣ
*2
H
0788
Data5
0
~255
1/1
0
*1
Ɣ
/
Ɣ
Ɣ
/
Ɣ
Ɣ
Ɣ
*2
H
0789
Data6
0~255
1/1
0
*1
Ɣ
/
Ɣ
Ɣ
/
Ɣ
Ɣ
Ɣ
*2
H
0792
Device name
Data1
0000~FFFF
1/1
0
*1
Ɣ
/
Ɣ
Ɣ
/
Ɣ
Ɣ
Ɣ
*2
H
0793
Data2
0000~ FFFF
1/1
0
*1
Ɣ
/
Ɣ
Ɣ
/
Ɣ
Ɣ
Ɣ
*2
H
0794
Data3
0000~ FFFF
1/1
0
*1
Ɣ
/
Ɣ
Ɣ
/
Ɣ
Ɣ
Ɣ
*2
H
0795
Data4
0000~ FFFF
1/1
0
*1
Ɣ
/
Ɣ
Ɣ
/
Ɣ
Ɣ
Ɣ
*2
H
0796
Data5
0000~ FFFF
1/1
0
*1
Ɣ
/
Ɣ
Ɣ
/
Ɣ
Ɣ
Ɣ
*2
H
0797
Data6
0000~ FFFF
1/1
0
*1
Ɣ
/
Ɣ
Ɣ
/
Ɣ
Ɣ
Ɣ
*2
H
0798
Data7
0000~ FFFF
1/1
0
*1
Ɣ
/
Ɣ
Ɣ
/
Ɣ
Ɣ
Ɣ
*2
H
0799
Data8
0000~ FFFF
1/1
0
*1
Ɣ
/
Ɣ
Ɣ
/
Ɣ
Ɣ
Ɣ
*2
H
0800
Communication speed (2-wire
RS485)
0:9600 bps
1:19200 bps
2:38400 bps
1/1 1 Enabled Ɣ/Ɣ Ɣ/Ɣ Ɣ Ɣ 6. 39. 1
H
0801 Parity (2-wire RS485)
0:Non parity
1:Even parity,
2:Odd parity
1/1 1 Enabled Ɣ/Ɣ Ɣ/Ɣ Ɣ Ɣ 6. 39. 1
H
0802
Inverter number (com
mon)
0~2
47
1/1
0
Enabled
Ɣ
/
Ɣ
Ɣ
/
Ɣ
Ɣ
Ɣ
6. 39. 1
H
0803
Communications time
-
out time
(common to 2-wire RS485 and
4
-
wire RS485)
0:OFF, 1~100 sec. 1/1 0 Enabled Ɣ/Ɣ Ɣ/Ɣ Ɣ Ɣ 6. 39. 1
H
0804
Communications time
-
out action
(common to 2-wire RS485 and
4-wire RS485)
0~8 1/1 8 Enabled Ɣ/Ɣ Ɣ/Ɣ Ɣ Ɣ 6. 39. 1
H
0805
Send waiting time (2
-
wire
RS485)
0.00:Default, 0.01~2.00 sec. 0.01/0.01 0.00 Enabled Ɣ/Ɣ Ɣ/Ɣ Ɣ Ɣ 6. 39. 1
H
0806
Master/slave setting for
inverter-to-inverter
communications (2-wire RS485)
0:Sl
ave (issues a 0Hz command if something
goes wrong with the master)
1:Slave (continues operation if something goes
wrong with the master)
2:Slave (trips for emergency stop if something
goes wrong with the master)
3:Master (sends a frequency command)
4:Master (sends an output frequency)
5.Master (sends a torque command)
6.Master (sends an output torque command)
1/1 0 Enabled Ɣ/Ɣ Ɣ/Ɣ Ɣ Ɣ 6. 39. 1
H
0807
P
rotocol selection (2
-
wire
RS485)
0:
TOSHIBA
1:MODBUS
1/1 0 Enabled Ɣ/Ɣ Ɣ/Ɣ Ɣ Ɣ 6. 39. 1
*1: This parameter is Read only.
*2:This function is for Etherenet communication option.(planning)