














K-13
E6581301
11
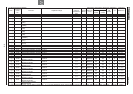
[14] Functions for lift [1/2] Sensorless vector/vector with sensor (Ɣ:Effective, -:Ineffective)
Title
Communi
cation
No.
Function Adjustment range
Minimum
setting unit
(Panel/Communi
cation)
Default
setting
Write during
running
Vector control
PM
control
V/f Reference
Speed
control
Torque
control
H
0324
Drooping output filter
0.1~200.0
rad/s (Enabled if
RV
=3,
4,
7 or 8)
0.1/0.1
100.0
Enabled
Ɣ
/
Ɣ
-
-
-
6. 15
H
0328
Light-load high-speed operation
selection
0:Disabled
1:High-speed operation speed set automatically
(Power running at F command: Increase)
2:High-speed operation speed set automatically
(Power running at R command: Increase)
3:High-speed operation speed set with H
(Power running at F command: Increase)
4:High-speed operation speed set with H
(Power running at
R
command:
Increase)
1/1 0 Disabled Ɣ/Ɣ - Ɣ Ɣ *1
H
0329
Light-load high-speed learning function
0:No
learning,
1:Forward run
learning
2:
R
everse run
learning
1/1 0 Disabled Ɣ/Ɣ - - - *1
H
0330
Automatic light
-
load high
-
speed
operation frequency
30.0~WN Hz 0.1/0.01 *2 Enabled Ɣ/Ɣ - Ɣ Ɣ *1
H
0331
Light
-
load high
-
speed operation
switching lower limit frequency
5.0~WN Hz 0.1/0.01 40.0 Enabled Ɣ/Ɣ - Ɣ Ɣ *1
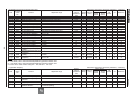
H
0332
Light
-
load high
-
speed operation
load waiting time
0.0~10.0 sec. 0.1/0.1 0.5 Enabled Ɣ/Ɣ - Ɣ Ɣ *1
H
0333
Light
-
load high
-
speed operation
load detection time
0.0~10.0 sec. 0.1/0.1 1.0 Enabled Ɣ/Ɣ - Ɣ Ɣ *1
H
0334
Light
-
load high
-
speed operation
heavy load detection time
0.0~10.0 sec. 0.1/0.1 0.5 Enabled Ɣ/Ɣ - Ɣ Ɣ *1
H
0335
Switching load torque during
power running
-250~250% 1/0.01 50 Enabled Ɣ/Ɣ - Ɣ Ɣ *1
H
0336
Heavy
-
load torque during power running
-
250~250%
1/0.01
100
Enabled
Ɣ/Ɣ
-
Ɣ
Ɣ
*1
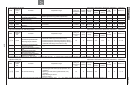
H
0337
Heavy
-
load torque during
constant power running
-250~250% 1/0.01 50 Enabled Ɣ/Ɣ - Ɣ Ɣ *1
H
0338
Switching load torque during
regenerative braking
-250~250% 1/0.01 50 Enabled Ɣ/Ɣ - Ɣ Ɣ *1
H
034
0
Creeping time
1
0.00~2
.
50
sec.
0.
0
1/0.01
0
Enabled
Ɣ/Ɣ
-
-
-
6. 17
H
0341 Braking mode selection
0:Disabled
,
1:Forward winding up
2:Reverse winding up
,
3:Horizontal operation
1/1 0 Disabled Ɣ/Ɣ - - - 6. 17
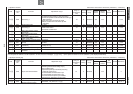
H
0342
Load portion torque input
selection
0:Disabled
,
1:VI/II (voltage/current input)
2:RR/S4 (potentiometer/voltage input)
3:RX (voltage input)
4:Henabled
5:2-wire RS485 communication input
6:4-wire RS485 communication input
7:Communications option input enabled
8:
Optional
A
I
1 (differential current input)
1/1 4 Enabled Ɣ/Ɣ - - - 6. 17
H
0343
Hoisting torque bias input (valid
only when H=)
-250~250% 1/0.01 100 Enabled Ɣ/Ɣ - - - 6. 17
H
0344
Lowering torque bias multiplier
0~
10
0%
1/0.01
10
0
Enabled
Ɣ
/
Ɣ
-
-
-
6. 17
H
034
5
Brake release time
0.00~2.5
0
sec.
0.01
/0.01
0.05
Enabled
Ɣ/Ɣ
-
-
-
6. 17
H
034
6
Creeping frequency
H
~20.0
Hz
0.1
/0.01
3.0
Disabled
Ɣ/Ɣ
-
-
-
6. 17
H
034
7
Creeping time
2
0.0
0
~2.5
0
sec.
0.01
/0.01
0.10
Enabled
Ɣ/Ɣ
-
-
-
6. 17
*1: For details, refer to Instruction Manual (E6581327) specified in Section 6.42. *2: Inverter with a model number ending with -WN, HN: 60.0 -WP: 50.0