



















E6581301
F-22
6
■
■■
■
If two signals are input simultaneously
• If a clear single and an up or down signal are input simultaneously, priority will be given to the clear signal.
• If up and down signals are input simultaneously, the frequency will be increased or reduced by the difference between
the settings of H and H. For example, if the H setting is larger, the frequency will be increased by
the value obtained by subtracting the setting of H from that of H.
■
■■
■
Setting of the initial motor operated pot mop setting
To adjust the frequency start at a specified frequency other than 0.0 Hz (default initial frequency) after turning on the
inverter, specify the desired frequency using H (initial motor operated pot mop setting).
■
■■
■
Change of the initial motor operated pot mop setting
To make the inverter automatically save the frequency immediately before it is turned off and start operation at that
frequency next time power is turned on, set H (change of initial motor operated pot mop setting) to (which
changes the setting of H when power is turned off).
Keep in mind that the setting of H is changed each time power is turned off.
■
■■
■
Frequency adjustment range
The frequency can be set from 0.0 Hz to HJ (Maximum frequency). The lower limit frequency will be set as soon as
the set frequency clearing function (function number , ) is entered from the input terminal.
■
■■
■
Minimum unit of frequency adjustment
If H (Frequency free unit magnification) is set to , the output frequency can be adjusted in steps of 0.01Hz.
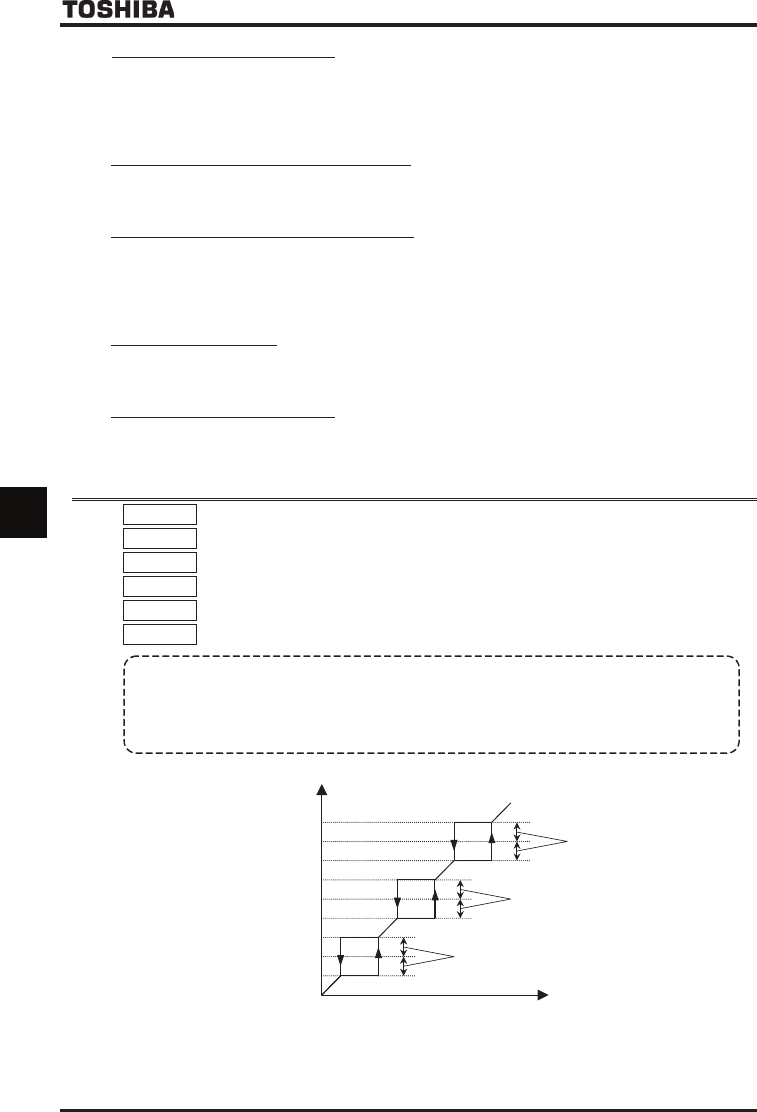
6.12 Jump frequency - jumping resonant frequencies
H
HH
H : Jump frequency 1
H
HH
H : Jumping width 1
H
HH
H : Jump frequency 2
H
HH
H : Jumping width 2
H
HH
H : Jump frequency 3
H
HH
H : Jumping width 3
• Function
Resonance due to the natural frequency of the mechanical system can be avoided by jumping the resonant
frequency during operation. During jumping, hysteresis characteristics with respect to the jump frequency
are given to the motor.
Jumping width 3 (
H
)
Jumping width 2 (
H
)
Jumping width 1 (
H
)Jump frequency 1 (
H
)
Jump frequency 3 (
H
)
Jump frequency 2 (
H
)
Frequency setting signal
0
Output frequency [Hz]