















E6581301
11
K-18
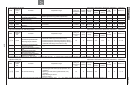
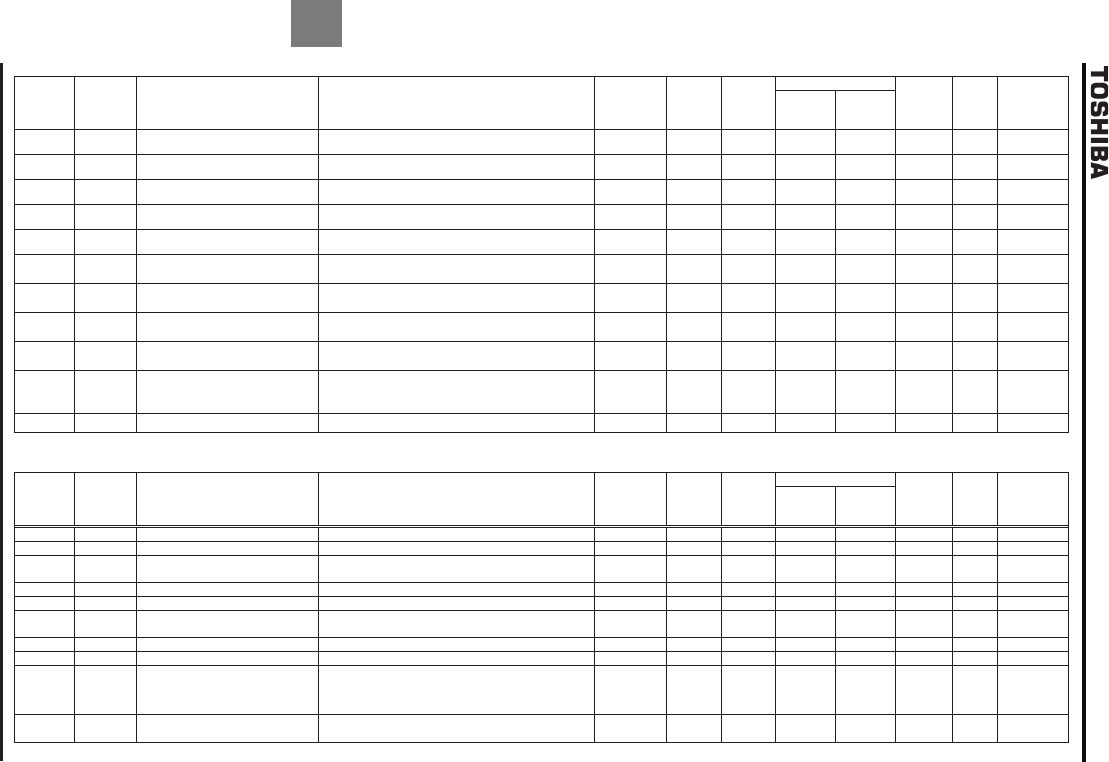
[20] Torque limit [2/2] Sensorless vector/vector with sensor (Ɣ:Effective, -:Ineffective)
Title
Communi
cation
No.
Function Adjustment range
Minimum
setting unit
(Panel/Communi
cation)
Default
setting
Write during
running
Vector control
PM
control
V/f Constant
Reference
Speed
control
Torque
control
H
0445
Regener
ative braking torque
limit 2 level
0.0~249.9%, 250.0:Disabled 0.1/0.01 250.0 Enabled Ɣ/Ɣ Ɣ/Ɣ Ɣ - 6. 25. 1
H
0446
Power running torque limit 3
level
0.0~249.9%, 250.0:Disabled 0.1/0.01 250.0 Enabled Ɣ/Ɣ Ɣ/Ɣ Ɣ - 6. 25. 1
H
0447
Regenerative braking t
orque
limit 3 level
0.0~249.9%, 250.0:Disabled 0.1/0.01 250.0 Enabled Ɣ/Ɣ Ɣ/Ɣ Ɣ - 6. 25. 1
H
0448
Power running torque limit 4
level
0.0~249.9%, 250.0:Disabled 0.1/0.01 250.0 Enabled Ɣ/Ɣ Ɣ/Ɣ Ɣ - 6. 25. 1
H
0449
Regenerative braking torque
limit 4 l
evel
0.0~249.9%, 250.0:Disabled 0.1/0.01 250.0 Enabled Ɣ/Ɣ Ɣ/Ɣ Ɣ - 6. 25. 1
H
0451
Acceleration/deceleration
operation after torque limit
0:In sync with acceleration/deceleration
1:In sync with min. time
1/1 0 Disabled Ɣ/Ɣ - Ɣ - 6. 25. 2
H
0452
Power running stall continuous
trip detection time
0.0~1.0 sec. 0.1/0.1 0.0 Enabled Ɣ/Ɣ - Ɣ Ɣ 6. 26. 1
H
0453
Regenerative braking stall
prevention mode selection
0:Stall during regenerative braking
1:Not stall during regenerative braking
1/1 0 Enabled Ɣ/Ɣ - Ɣ Ɣ 6. 26. 2
H
0454
Constant output zone torque
limit selection
0:Constant output limit
1:Constant torque limit
1/1 0 Disabled Ɣ/Ɣ Ɣ/Ɣ Ɣ - 6. 25. 1
H
0455
Torque reference
polarity selection
0:It is interchangeable so far.
(When reversing,reverses the polarity.)
1:The polarity doesn't reverse when reversing
.
1/1 0 Disabled Ɣ/Ɣ Ɣ/Ɣ Ɣ - *1
H
0456
Factory specific coefficient 1 -
1/1 0 Disabled
-
-
-
-
-
*1: For details, refer to Instruction Manual (E6581331) specified in Section 6.42
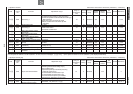
[21] Adjustment parameters [1/2] Sensorless vector/vector with sensor (Ɣ:Effective, -:Ineffective)
Title
Communi
cation
No.
Function Adjustment range
Minimum
setting unit
(Panel/Communi
cation)
Default
setting
Write during
running
Vector control
PM
control
V/f Constant
Reference
Speed
control
Torque
control
H
0458
Current control proportional gain
0.0
~1
0
0
0
1/1
0
Disabled
Ɣ
/
Ɣ
Ɣ
/
Ɣ
-
-
*1
H
0460
Speed loop proportional gain
1~
9999
1/1
12
Enabled
Ɣ
/
Ɣ
-
-
-
*1
H
0461
Speed loop stabilization
coefficient
1~9999 1/1 100 Enabled Ɣ/Ɣ - - - *1
H
0462
Moment of inertia of load 1
0
~1
0
0
1/1
35
Enabled
Ɣ
/
Ɣ
-
Ɣ
-
*1
H
046
3
Second speed loop proportional gain
1~
9999
1/1
12
Enabled
Ɣ
/
Ɣ
-
-
-
*1
H
0464
Second speed loop stabilization
coefficient
1~9999 1/1 100 Enabled Ɣ/Ɣ - Ɣ - *1
H
046
5
Moment of inertia of load 2
0
~1
0
0
1/1
35
Enabled
Ɣ
/
Ɣ
-
Ɣ
-
*1
H
046
6
Speed PI switching frequency
0.0~
HJ
Hz
1/1
0.0
Enabled
Ɣ
/
Ɣ
-
-
-
*1
H
0467 Motor oscillation control
0:Disabled
1:Enabled(Low gain)
2:Enabled(Middle gain)
3:
Enabled(High gain)
1/1 0 Disabled -/- -/- - Ɣ 6.27.2
H
0468
Stall prevention control
switching
0: Stall prevention control 1
1: Stall prevention control 2
1/1 0 Disabled
-/- -/- - Ɣ 6.26.3
*1: For details, refer to Instruction Manual (E6581333) specified in Section 6.42.
*2: Settings vary from unit to unit. Even if V[R is set to , no change is made to these values.