











K-44
E6581301
11
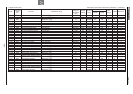
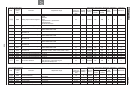
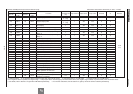
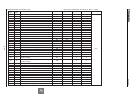
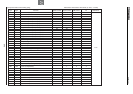
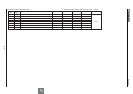
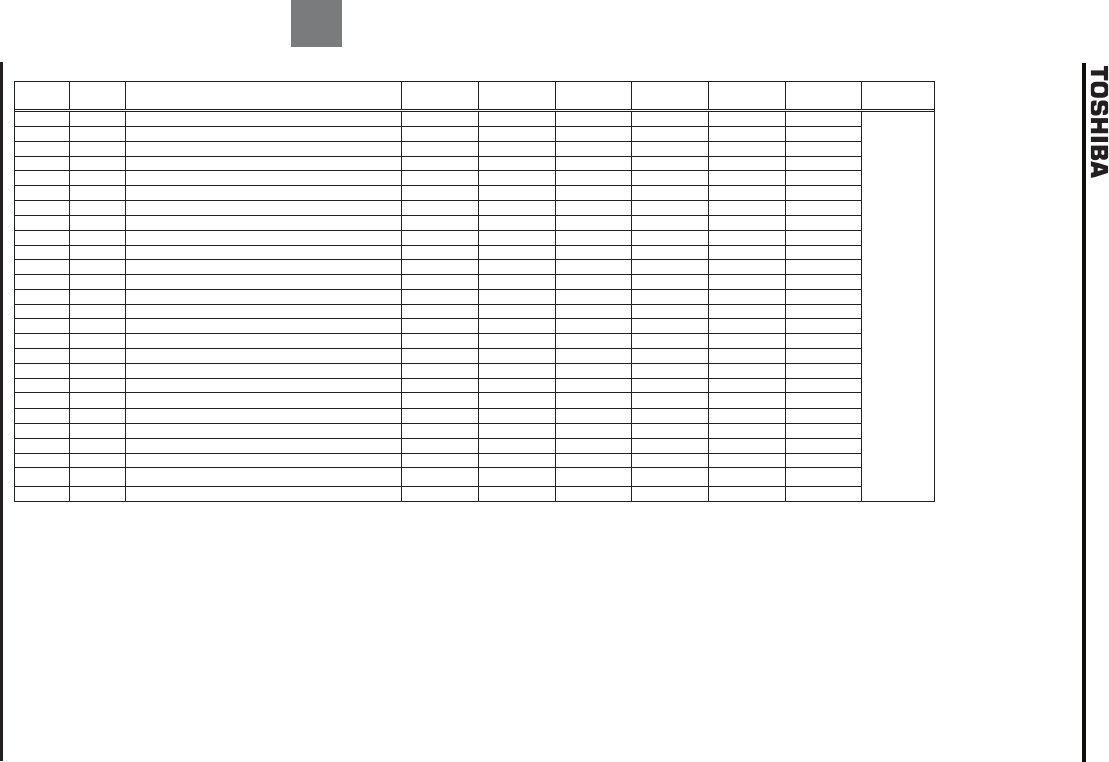
[Input terminal function setting (2/2)] Sensorless vector/vector with sensor (Ɣ: valid, -: invalid)
Positive
logic
Negative
logic
Function
Speed
control
Torque
control
PM control V/f EOQF= H= Reference
70 71 Servo lock signal Ɣ/Ɣ - Ɣ Ɣ Ɣ -
7.2.1
72 73 Simple positioning (positioning loop) Ɣ/Ɣ - Ɣ Ɣ Ɣ -
74 75 Integrating wattmeter display clear Ɣ/Ɣ - Ɣ Ɣ Ɣ -
76 77 Trace back trigger signal Ɣ/Ɣ - Ɣ Ɣ Ɣ -
78 79 Light-load high-speed operation prohibitive signal Ɣ/Ɣ - Ɣ Ɣ Ɣ -
86 87 Binary data write Ɣ/Ɣ Ɣ/Ɣ Ɣ Ɣ Ɣ -
88 89 Motor operated pot mop setting (up)*1 Ɣ/Ɣ - Ɣ Ɣ Ɣ -
90 91 Motor operated pot mop setting (down)*1 Ɣ/Ɣ - Ɣ Ɣ Ɣ -
92 93 Motor operated pot mop setting (clear) Ɣ/Ɣ - Ɣ Ɣ Ɣ -
94 95 Dancer Correction OFF Ɣ/Ɣ - Ɣ Ɣ Ɣ -
98 99 Forward/reverse selection Ɣ/Ɣ Ɣ/Ɣ Ɣ Ɣ Ɣ -
100 101 Run/Stop command Ɣ/Ɣ Ɣ/Ɣ Ɣ Ɣ Ɣ -
102 103 Commercial power/INV switching Ɣ/Ɣ - Ɣ Ɣ Ɣ -
104 105 Frequency reference priority switching Ɣ/Ɣ - Ɣ Ɣ Ɣ -
106 107 VI/II terminal priority Ɣ/Ɣ - Ɣ Ɣ Ɣ -
108 109 Command terminal board priority Ɣ/Ɣ Ɣ/Ɣ Ɣ Ɣ Ɣ -
110 111 Parameter editing enabling Ɣ/Ɣ Ɣ/Ɣ Ɣ Ɣ Ɣ -
112 113 Speed/Torque switching Ɣ/Ɣ Ɣ/Ɣ - - *2 -
122 123 Rapidest deceleration command Ɣ/Ɣ - Ɣ Ɣ Ɣ -
124 125 Preliminary excitation Ɣ/Ɣ Ɣ/Ɣ Ɣ Ɣ Ɣ -
126 127 Braking request Ɣ/Ɣ - Ɣ Ɣ Ɣ -
130 131 Brake answer back input Ɣ/Ɣ - Ɣ Ɣ Ɣ -
134 135 Traverse permission signal Ɣ/Ɣ - Ɣ Ɣ Ɣ -
136 151 (reservation) - - - - - -
152 153 V/f ratio switching -/- - - Ɣ *3 -
154 155 Manual torque boost switching signal -/- - - Ɣ *3 -
*1: The deceleration/deceleration time depends on the CEE/FGE setting, unless switching between acceleration and deceleration is performed.
*2: Dependent on EOQF.
*3ᲴIt is effective for all command, not follow EOQF