



















E6581301
F-16
6
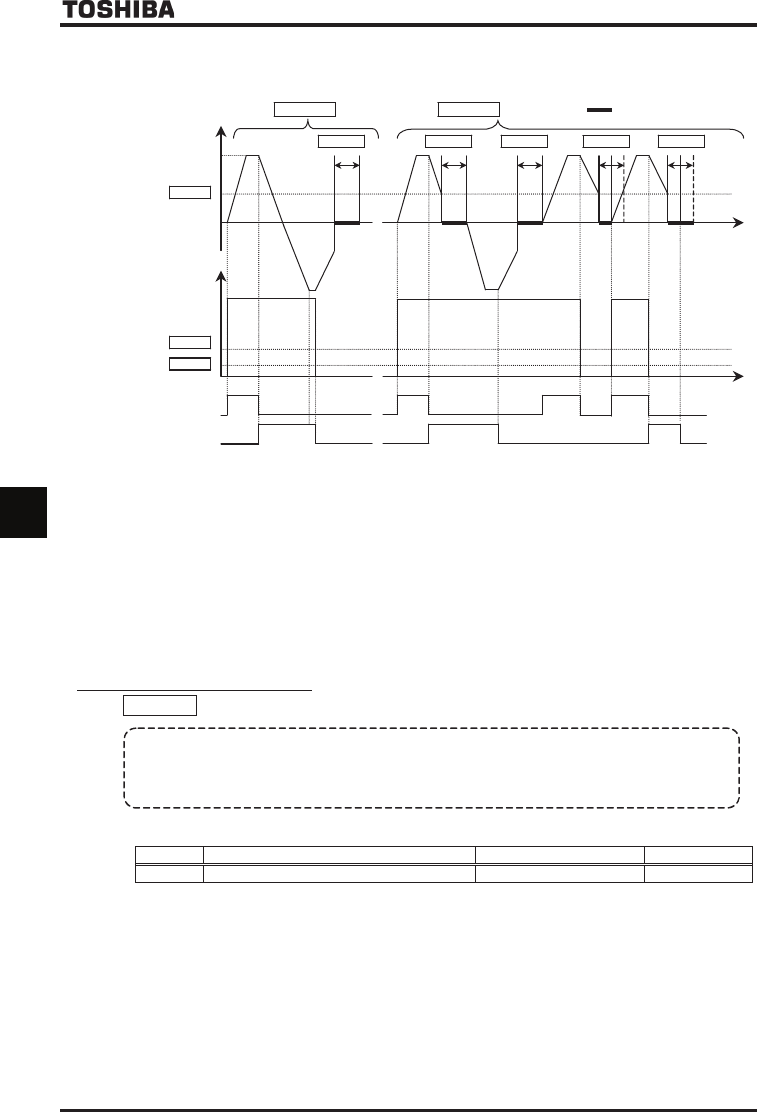
[Priority to DC braking during forward/reverse operation] (Forward/reverse run DC braking priority control
H=[Enabled])
Time [s]
H
H
Output frequency [Hz]
Forward run signal (F-CC)
(SW1 set to sink logic)
ON
OFF
Reference frequency
0
0
Set frequency
~
~
~
~
~
~
~
~
H
H
: DC braking
H
H
(4) (5) (6)
Reverse run signal (R-CC)
(SW1 set to sink logic)
ON
OFF
H
H
=
H
=
H
(7)
«SW1 set to sink logic»
(4) During normal forward/reverse run (H=) : Not recognized as a stop command, so that the DC
braking is not active.
(5) If a reverse run (or forward) command is entered during forward run (or reverse) (H=) :
DC braking when the frequency set with H
decreases below the reference frequency during
deceleration.
(6) If an operation command is entered during DC braking : RUN command has a priority.
(7) If an operation command is changed from ON to OFF during DC braking, DC braking is discontinued to stop the
operation.
6.8.2 Motor shaft fixing control
H
HH
H : Motor shaft fixing control
• Function
This function is used to prevent the motor from running unexpectedly after the motor is stopped because
it’s shaft is not restrained or to preheat the motor.
[Parameter setting]
Title
Function
Adjustment range
Default setting
H
Motor shaft fixing control
:Disabled, :Enabled
If the motor shaft fixing control parameter H is set at , DC braking continue at half a braking rate of that set
with H to retain the motor after it has come to a full stop by DC braking. To terminate the motor shaft fixing
control cut off the standby signal (ST signal).
Note: This function doesn't operate after a DC braking command is entered by control input terminal signal.