



















E6581301
F-4
6
• Function
This parameter is used to give priority to certain external commands entered from the terminal board in
operation panel and operation mode.
For example, when jogging the motor by giving signals externally.
6.2.2
Assigning priority to the terminal board in the operation panel and operation mode
H
HH
H
: Input terminal priority selection
[Parameter setting]
Title Function Adjustment range Default setting
H Input terminal priority selection :Disabled, :Enabled
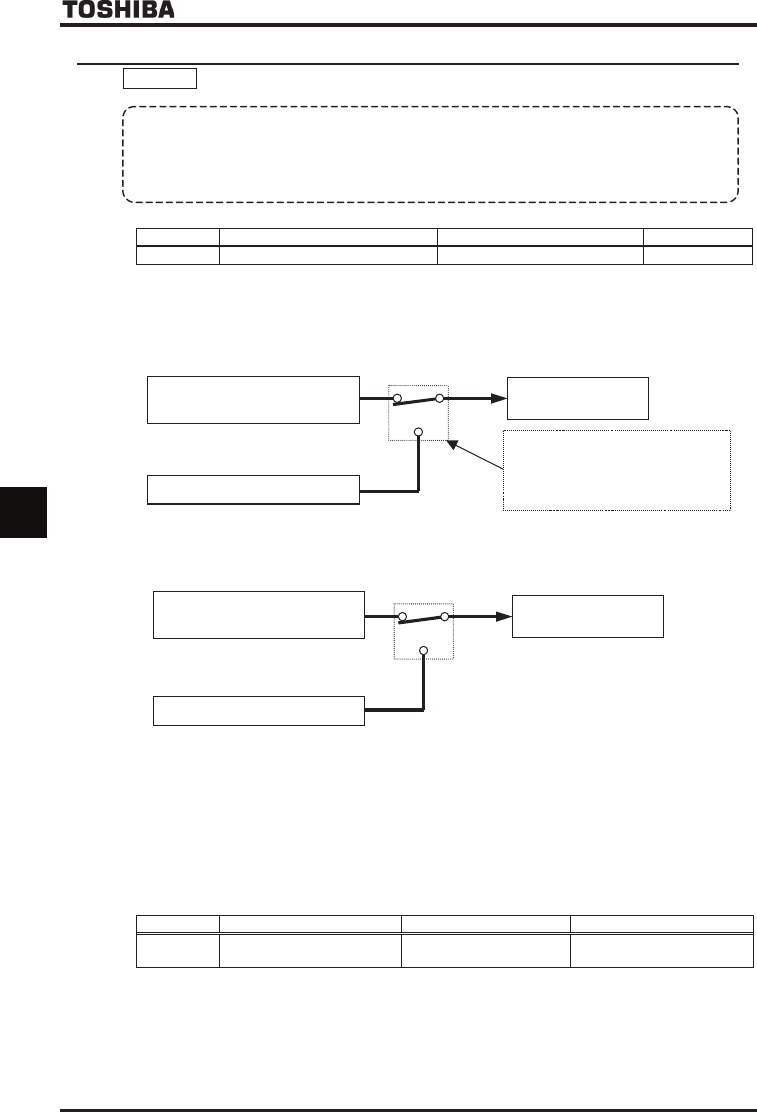
[: Deselect (terminal board has no priority)]
Priority is always given to commands (operation commands) entered from the operation panel. To give priority to
commands from the terminal board, it is necessary to switch from control panel operation to terminal board
operation by sending signals through the terminal board.
Command from the operation panel
(
EOQF
=
)
Command from the terminal board
Valid command
The mode switching terminals
are used to switch to terminal
board operation mode.
Refer to Section 7.2.
[: Select (terminal board has priority)]
Priority is given to commands entered from the terminal board even in operation panel operation mode.
Command from the operation panel
(EOQF=)
Command from the terminal board
Internal command
A
B
A: No command from the terminal board.
B: Command from the terminal board.
■
Priority command from terminal board (Operation command)
Jog run : input terminal selection /
DC braking : input terminal selection /
An example of switching to jog run in operation panel operation mode.
[In case that terminals S3 and CC are assigned to jog run]
Assign control terminal S3 ([: preset speed 3] in default setting) as the jog run setting terminal.
Title Function Adjustment range Example of setting
H
Input terminal function
selection 7 (S3)
~ (Jog run settin g terminal)