














K-31
E6581301
11
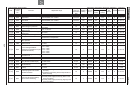
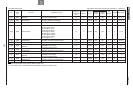
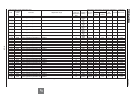
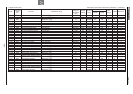
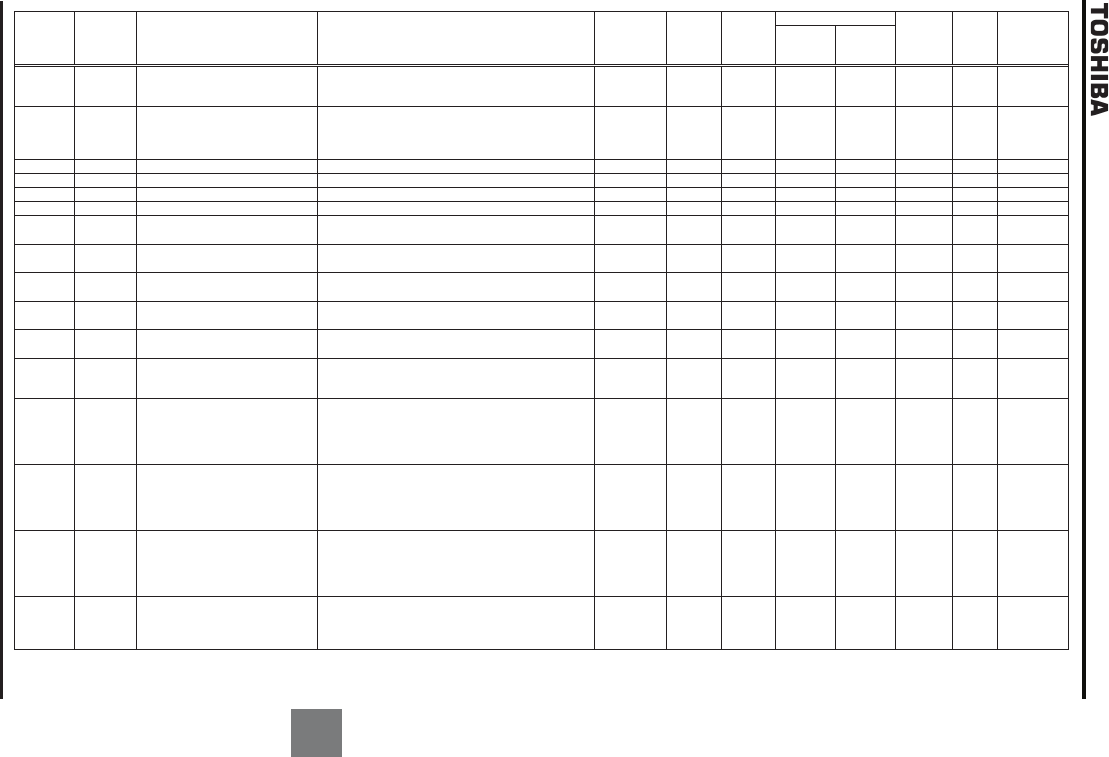
[29] Communication function [2/4] Sensorless vector/vector with sensor (Ɣ:Effective, -:Ineffective)
Title
Communi
cation
No.
Function Adjustment range
Minimum
setting unit
(Panel/Communi
cation)
Default
setting
Write during
running
Vector control
PM
control
V/f Constant
Reference
Speed
control
Torque
control
H
0808
Communication1 time-out
condition selection
0:Disconnection
detection
1:When communication mode enable
2:1+Driving operation
1/1 0 Enabled Ɣ/Ɣ Ɣ/Ɣ Ɣ Ɣ *1
H
0810 Frequency point selection
0:Disabled
1:2-wire RS485
2:4-wire RS485
3:Communication add option
1/1 0 Enabled Ɣ/Ɣ - Ɣ Ɣ 6. 39. 1
H
0811
Point 1 setting
0
-
100%
1/1
0
Enabled
*2
Ɣ
/
Ɣ
-
Ɣ
Ɣ
6. 39. 1
H
0812
Point 1 frequency
0.0~
HJ
Hz
0.1/0.01
0.0
Enabled
*2
Ɣ
/
Ɣ
-
Ɣ
Ɣ
6. 39. 1
H
0813
Point 2 setting
0~100%
1/1
100
Enabled
*2
Ɣ
/
Ɣ
-
Ɣ
Ɣ
6. 39. 1
H
0814
Point 2 frequency
0.0~
HJ
Hz
0.1/0.01
60
Enabled
*2
Ɣ
/
Ɣ
-
Ɣ
Ɣ
6. 39. 1
H
0815
Address monitor
(Modbus plus)
1~64 1/1 1 *5
Ɣ/Ɣ Ɣ/Ɣ Ɣ Ɣ *3
H
0816
Command selection
(Modbus plus)
0: Prohibit
1: Permit
1/1 0 Enabled
Ɣ/Ɣ Ɣ/Ɣ Ɣ Ɣ *3
H
0817
Number of command
(Modbus plus)
0~8 1/1 0 Enabled Ɣ/Ɣ Ɣ/Ɣ Ɣ Ɣ *3
H
0818
Number of monitors
(Modbus plus)
0~8 1/1 0 Enabled Ɣ/Ɣ Ɣ/Ɣ Ɣ Ɣ *3
H
0819
Command station
(Modbus plus)
0~64 1/1 0 Enabled Ɣ/Ɣ Ɣ/Ɣ Ɣ Ɣ *3
H
0820
Communication speed
(4-wire RS485)
0:9600
bps
1:19200 bps
2:38400
bps
1/1 1 Enabled Ɣ/Ɣ Ɣ/Ɣ Ɣ Ɣ 6. 39. 1
H
0821
Baud rate
(Ethernet)
0:Automatic detection
1:10Mbps Full
2:10Mbps Half
3:100Mbps Full
4:100Mbps Half
1/1 0 Enabled Ɣ/Ɣ Ɣ/Ɣ Ɣ Ɣ *4
H
0822
BDXGrate monitor right port
(Ethernet)
0:Automatic detection
1:10Mbps Full
2:10Mbps Half
3:100Mbps Full
4:100Mbps Ha
lf
1/1 - *5 Ɣ/Ɣ Ɣ/Ɣ Ɣ Ɣ *4
H
0823
Baud rate monitor left port
(Ethernet)
0:Automatic detection
1:10 Mbps Full
2:10Mbps Half
3:100Mbps Full
4:100Mbps Half
1/1 - *5 Ɣ/Ɣ Ɣ/Ɣ Ɣ Ɣ *4
H
0824 (Reservation)
0:
-
1:-
2:-
3:
-
1/1 0 Enabled Ɣ/Ɣ Ɣ/Ɣ Ɣ Ɣ *4
*1: For details, refer to Instruction Manual (E6581315) specified in Section 6.42. *2: Effective when a command value is sent by communication.
*3: This function is for Modbus plus communication option (planning). *4: This function is for Etherenet communication option (planning).
*5: This parameter is read only.