



















F-14
6.7 Operation frequency
6.7.1 Start-up frequency and End frequency
Start-up frequency
Stop frequency
[Parameter setting]
Title Function Adjustment range Default setting
Start-up frequency
[Hz]
Stop frequency
[Hz]
Note) Set these parameters so that the start-up frequency is higher than the stop frequency .
If the -set frequency is lower than the -set frequency, the reference frequency
must be higher than the -set frequency to start the motor.
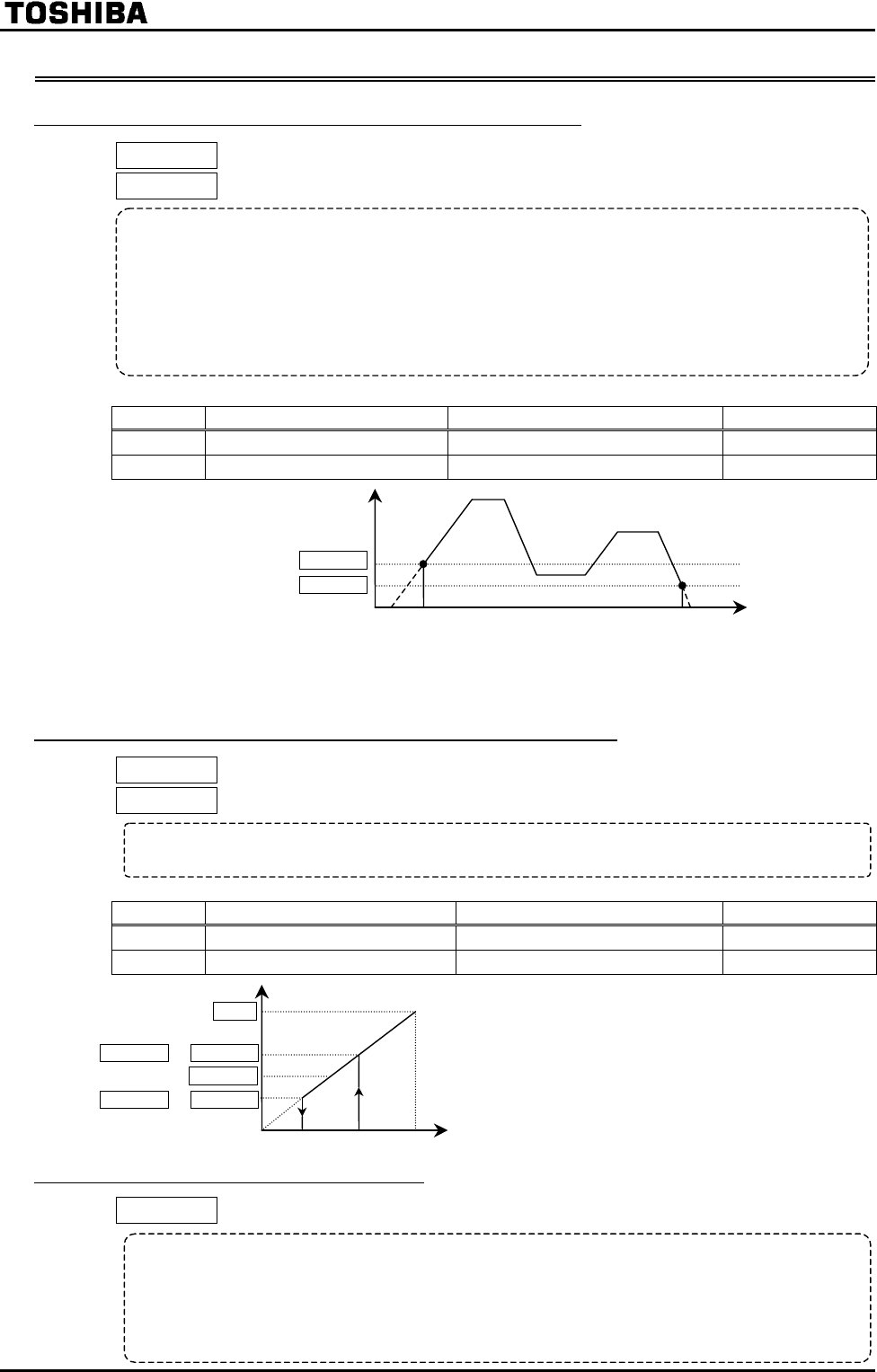
6.7.2 Operating by means of reference signals
Run frequency
Run frequency hysteresis
[Parameter setting]
Title Function Adjustment range Default setting
Run frequency
Run frequency hysteresis
[Hz]
6.7.3 0Hz dead band frequency
0Hz dead band frequency
Function
The frequency set with the parameter is put out immediately.
These parameters are used if the acceleration/deceleration time causes a delay in the response of
the starting torque. It is advisable to set these frequencies between 0.5 and 2 Hz (at a maximum
of 5 Hz). This setting reduces the slippage of motor below the rated value to prevent over-current.
If 0 speed torque is needed(pt = ,), set , at .
At startup: frequency set with is put out immediately.
At sto
p
: The out
p
ut fre
q
uenc
y
dro
p
s to 0 Hz immediatel
y
b
y
the fre
q
uenc
y
set with
.
Function
The start and stop of the motor can be controlled simply by giving frequency setting signals.
Start-up frequency
Stop frequency
Output frequency [Hz]
[s]
The motor starts to accelerate when the
frequency setting signal reaches point B, while
it starts to decelerate and stop when the
frequency setting signal falls below point A.
0 A B 100 Frequency reference [%]
Output frequency [Hz]
Function
In order to fixe the motor axis by the control with a sensor, you may set frequency
reference as 0[Hz] by the analog input etc.. But it may be set to 0[Hz] neither
by the drift nor offset. In such a case, this function sets frequency instructions to
0[Hz] certainly. When frequency reference is smaller than -set value,
fre
q
uenc
y
reference is set to 0
[
Hz
]
.