




J-10
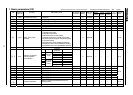
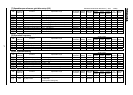
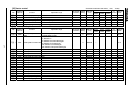
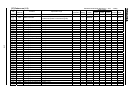
[16] Functions for lift (2/2)
Vector control
Title
Communi
cation No
Function Adjustment range
Min. unit (panel/
communication)
Default
setting
Write during
running
Speed
control
To rque
control
Position
control
V/f
Constant
Reference
section
0340 Heavy load torque during fixed speed in reverse direction 0 250 [%] 1 100 Enabled /
0341 Automatic light-load high-speed operation frequency 30.0 [Hz] 0.01/0.01 80.0 Enabled /
0342 Light-load detection mode 0 255 1/1 0 Disabled /
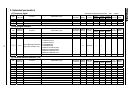
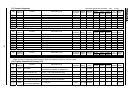
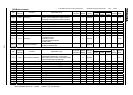
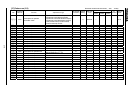
[17] Commercial/inverter switching function
Vector control
Title
Communi
cation No
Function Adjustment range
Min. unit (panel/
communication)
Default
setting
Write during
running
Speed
control
To rque
control
Position
control
V/f
Constant
Reference
section
0354
Output signal selection of
commercial power/inverter
switching
0: OFF, 1: Automatic switching in case of trip
2:
Commercial power switching frequency setting enabled
3: Both (1+2)
0 Disabled / / 6.16
0355
Commercial power/inverter
switching frequency
0 [Hz] 0.01/0.01 60.0 Enabled / / 6.16
0356
Inverter side switching waiting time
Model dependent 10.00 [s] 0.01/0.01 See J-28 Enabled / / 6.16
0357
Commercial power side
switching waiting time
0.37 10.00 [s] 0.01/0.01 0.62 Enabled / / 6.16
0358
Commercial power switching
frequency holding time
0.1 10.0 [s] 0.1/0.01 2.0 Enabled / / 6.16
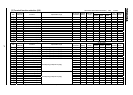
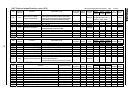
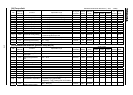
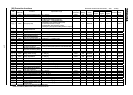
[18] PID control
Vector control
Title
Communi
cation No
Function Adjustment range
Min. unit (panel/
communication)
Default
setting
Write during
running
Speed
control
To rque
control
Position
control
V/f
Constant
Reference
section
0360
Signal selection of PID control 0: PID control disabled, 1: VI/II, 2: RR, 3: RX, 4: RX2
0Enabled/ 3.3
0361 Delay filter 0 255 0Enabled/ 3.3
0362 Proportional (P) gain 0.01 100.0 0.01/0.01 0.1 Enabled / 3.3
0363 Integral (I) gain 0.01 100.0 0.01/0.01 0.1 Enabled / 3.3
0364 PID deviation upper limit 0 50 [%] 1/0.01 50 Enabled / 3.3
0365 PID deviation lower limit 0 50 [%] 1/0.01 50 Enabled / 3.3
0366 Differential (D) gain 0.00 2.55 0.01/0.01 0 Enabled / 3.3
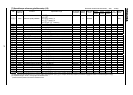
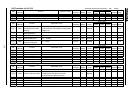
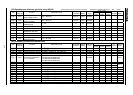
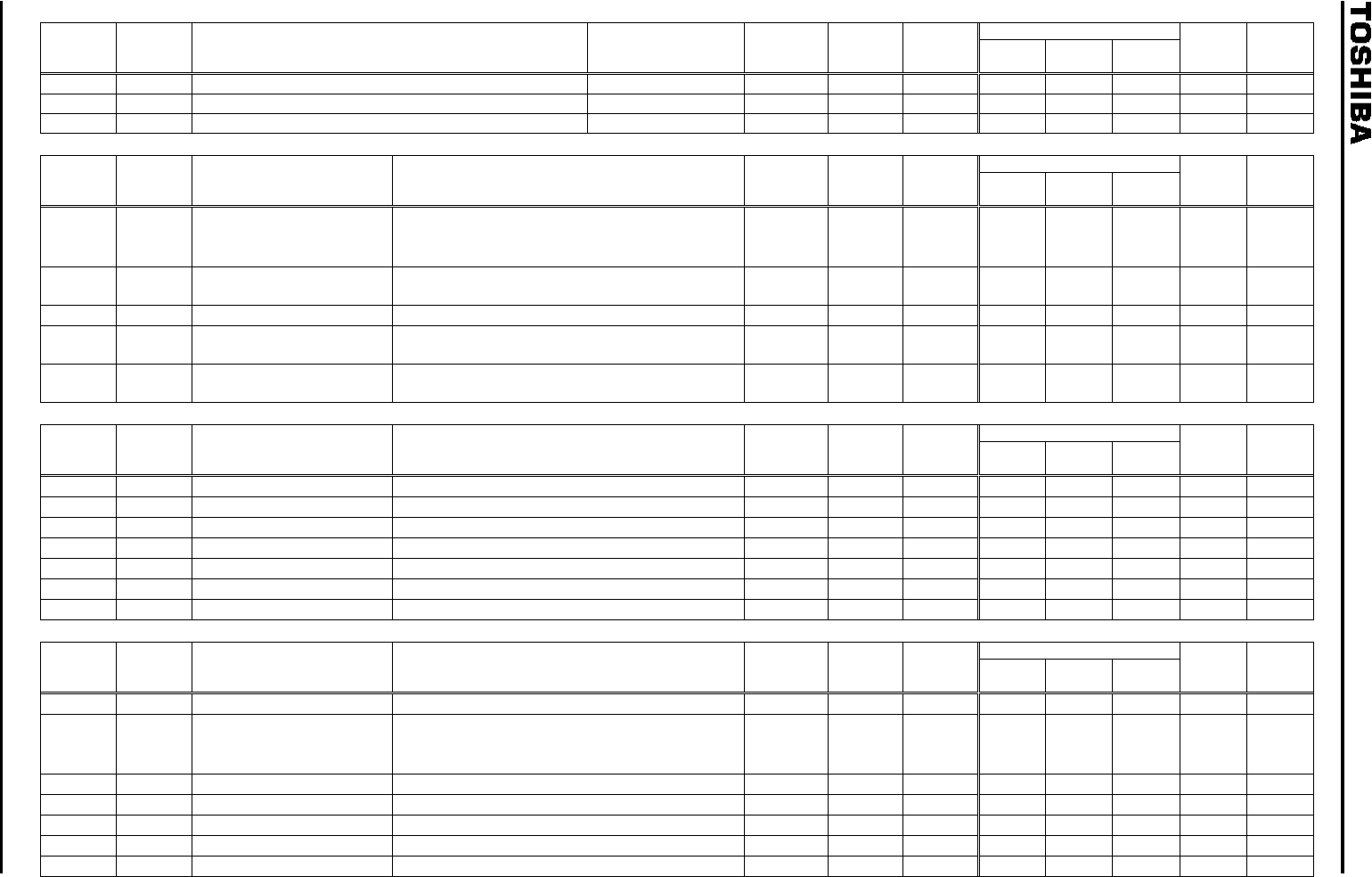
[19] Speed feedback/positioning control
Vector control
Title
Communi
cation No
Function Adjustment range
Min. unit (panel/
communication)
Default
setting
Write during
running
Speed
control
To rque
control
Position
control
V/f
Constant
Reference
section
0367 Number of PG input pulses 1 9999 1/1 500 Disabled / / /
0368 Number of PG input phases
1: Single-phase input, 2: Two-phase input
3: Single-phase input (Speed command),
4: Two-phase input (Speed command)
2 Disabled / / /
0369 PG disconnection detection 0: Disabled, 1: Enabled 0 Disabled / / /
0370 Electronic gear 100 to 4000 pulses/rotation 1/1 1000 Disabled /
0371 Position loop gain 0.0 100.0 0.1/0.01 4.0 Enabled /
0372 Positioning completion range 1 4000 1/1 100 Enabled /
0373
Frequency limit at position control
1 8000 [Hz/s], 8001: disabled 1/1 800 Disabled /
Sensorless vector/vector with sensor ( valid, :invalid)
(Reference section): Refer to the inverter's individual manual.