



















F-18
rotation if is set up highly, please be careful. A trip may occur according to load
conditions.
Note.6) Setting of this function will influence following DC injection brakings.
1. DC injection braking by terminal command (the input terminal functions 22 and 23)
2. DC injection braking by command via communication
3. DC injection braking when (Jog stop control) is set at .
4. DC injection braking when (Emergency stop mode selection) is set at or .
6.9 Jog run
Jog run frequency
Jog stop control
Jog run is operational when the terminals S4(assigned to Jog)-CC are active.
[Parameter setting]
Title Function Adjustment range Default setting
Jog run frequency
[Hz]
Jog stop control
: Deceleration stop, : Coast stop,
: DC injection braking stop
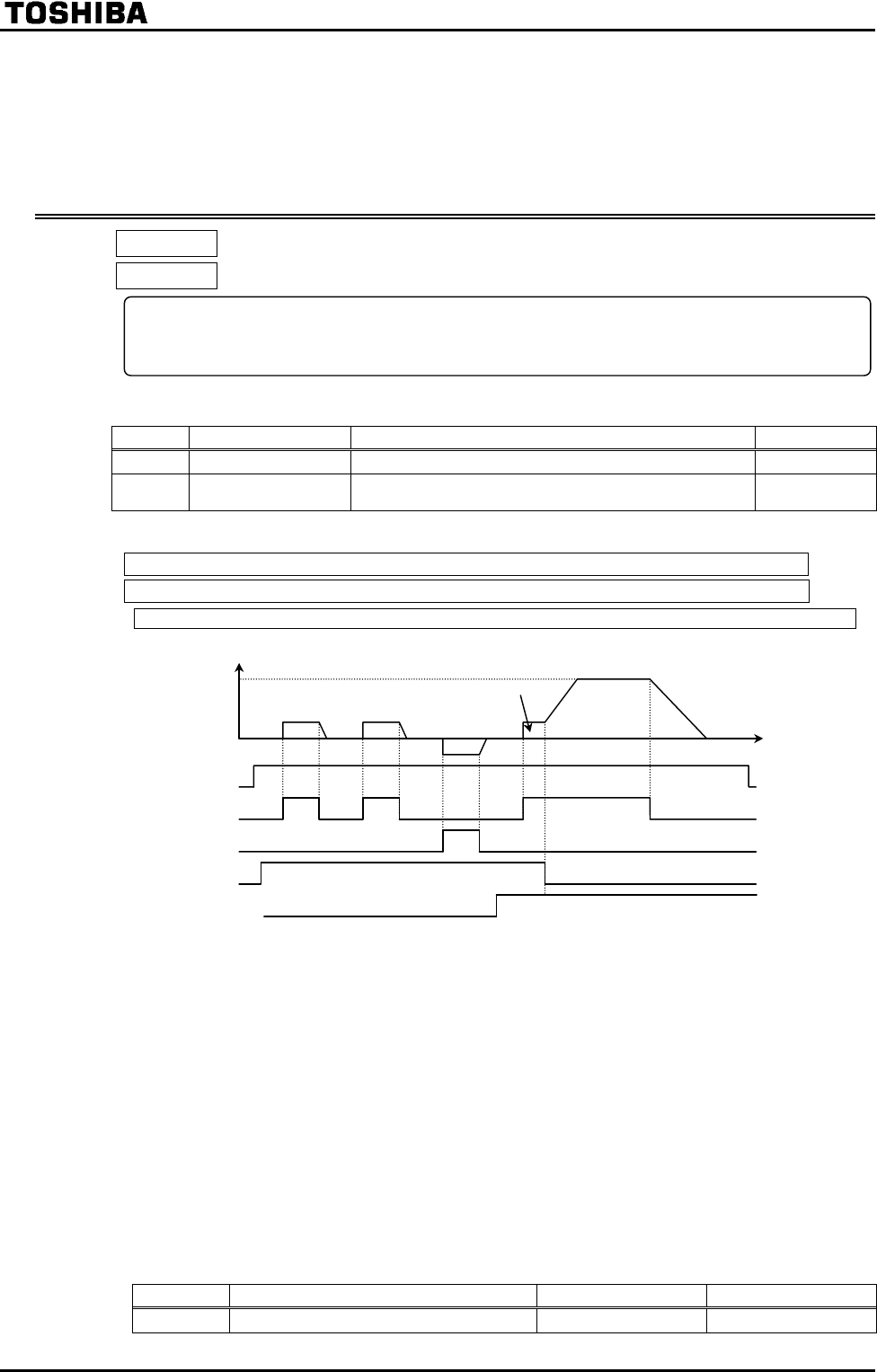
<Example of jog run>
Forward jog run when S4-CC (Jog terminal) is ON, and F-CC are ON (connected)
Reverse jog run when S4-CC (Jog terminal) is ON, and R-CC are ON (connected)
( Forward run (or reverse) if a frequency reference is given when F-CC are ON (or R-CC are ON) )
The terminals S4 and CC assigned to jog run are enabled when the operation frequency is lower than
the jog frequency, and they are disabled if not. To switch to jog run during normal operation, set the
forced jog run parameter (input terminal function selection) at 50 or 51 (inversion), and 52 or 53
(inversion).
Jog run is operational when the jog run terminals S4-CC is active (ON).
Priority is given to jog run even when an operation command is entered during jog run.
In control panel operation mode, setting the parameter (input terminal priority selection) at
makes it possible to perform jog run, using the Run and Stop keys.
Even when
is set at or , an emergency DC injection braking stop can be used (
is
set at or ).
If F-CC and R-CC are ON simultaneously when
(Priority selection) is set at (reverse run),
operation modes switches as follows:
Forward jog run -> slowdown stop (jog frequency -> 0 [Hz]) -> reverse jog run.
[Setting of jog terminals S4-CC]
Assign the control terminal S4 to jog run (default setting:16 (preset-speed #4)).
Title Function Adjustment range Setting value
Input terminal selection #8 (S4)
(Jog run)
Note) During jog run, Low-speed signal may be output but not RCH signal, and PID control is disabled.
Function
The jog run parameters are used to jog the motor. When a jog run signal is given, the jog
run frequency is put out immediately irrespective of the predetermined acceleration time.
ST-CC
F-CC
R-CC
S4-CC
Output frequency [Hz]
Forward
Reverse
Forward
Forward
0
Setting frequency
Setting frequency
time [s]