




J-9
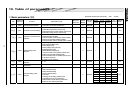
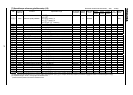
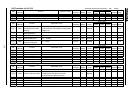
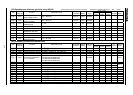
[14] Tripless intensification setup (2/2)
Vector control
Title
Communi
cation No
Function Adjustment range
Min. unit (panel/
communication)
Default
setting
Write during
running
Speed
control
To rque
control
Position
control
V/f
Constant
Reference
section
0307
Base frequency voltage
(Voltage compensation)
0: without voltage compensation (limitless output voltage)
1: with voltage compensation (limitless output voltage)
2: without voltage compensation (limited output voltage)
3: with voltage compensation (limited output voltage)
Disabled
This parameter is changeable,
but significant setting value is
fixed to 1 in vector control.
6.13.6
0308 Dynamic braking resistance 1.0 1000 [ ] 0.1/0.1 See J-28 Disabled / / / 6.13.4
0309
Dynamic braking resistor capacity
0.01 600.0 [kW] 0.01/0.01 See J-28 Disabled / / / 6.13.4
0310
Ride-through time / Deceleration time
0.0 320.0 [s] 0.1/0.01 2.0 Enabled / / / 6.13.2
0311 Reverse-run prohibition
0: Permitted, 1: Reverse run prohibited,2: Forward run prohibited,
3: Direction designated by command permitted
0 Disabled / / 6.13.7
0312 Auto-restart adjustment #1 0.50 2.50 0.01/0.01 See J-28 Enabled / / / 6.13.1
0313 Auto-restart adjustment #2 0.50 2.50 0.01/0.01 See J-28 Enabled / / / 6.13.1
0314 Auto-restart mode 0 4 1/1 See J-28 Disabled / / / 6.13.1
0315 Auto-restart adjustment #3 0 9 1/1 1 Disabled / / / 6.13.1
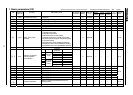
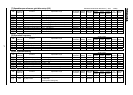
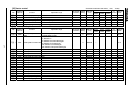
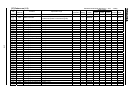
[15] Drooping control
Vector control
Title
Communi
cation No
Function Adjustment range
Min. unit (panel/
communication)
Default
setting
Write during
running
Speed
control
To rque
control
Position
control
V/f
Constant
Reference
section
0320 Drooping gain 0 100 [%] (Enabled if = 7, 8 or 9) 1/0.01 0 Enabled / 6.14
0321 Speed at drooping gain 0% 0.0 320.0 [Hz] (Enabled if = 7, 8 or 9) 0.01/0.01 60.0 Enabled / 6.14
0322
Speed at drooping gain
0.0 320.0 [Hz] (Enabled if = 7, 8 or 9) 0.01/0.01 60.0 Enabled / 6.14
0323
Drooping insensitive torque band
0 100 [%] (Enabled if = 7, 8 or 9) 1/0.1 10 Enabled / 6.14
0324 Output filter for drooping 0.1 200.0 [rad/s] (Enabled if = 7, 8 or 9) 0.1/0.1 100.0 Enabled / 6.14
0325
Load inertia (Acc/Dec torque)
0 1000 0.1/0.1 1.0 Enabled /
0326
Load torque filter (Acc/Dec torque)
0.0 199.9, 200.0:without filter 0.1/0.1 200.0 Enabled /
0327 Drooping reference selection
0: Standard, 1: Acc/dec torque removal
2: Internal torque standard
3:
Acc/dec torque removal (internal torque standard)
0Enabled/
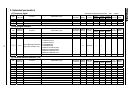
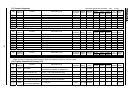
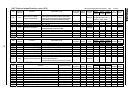
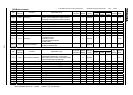
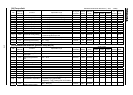
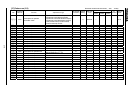
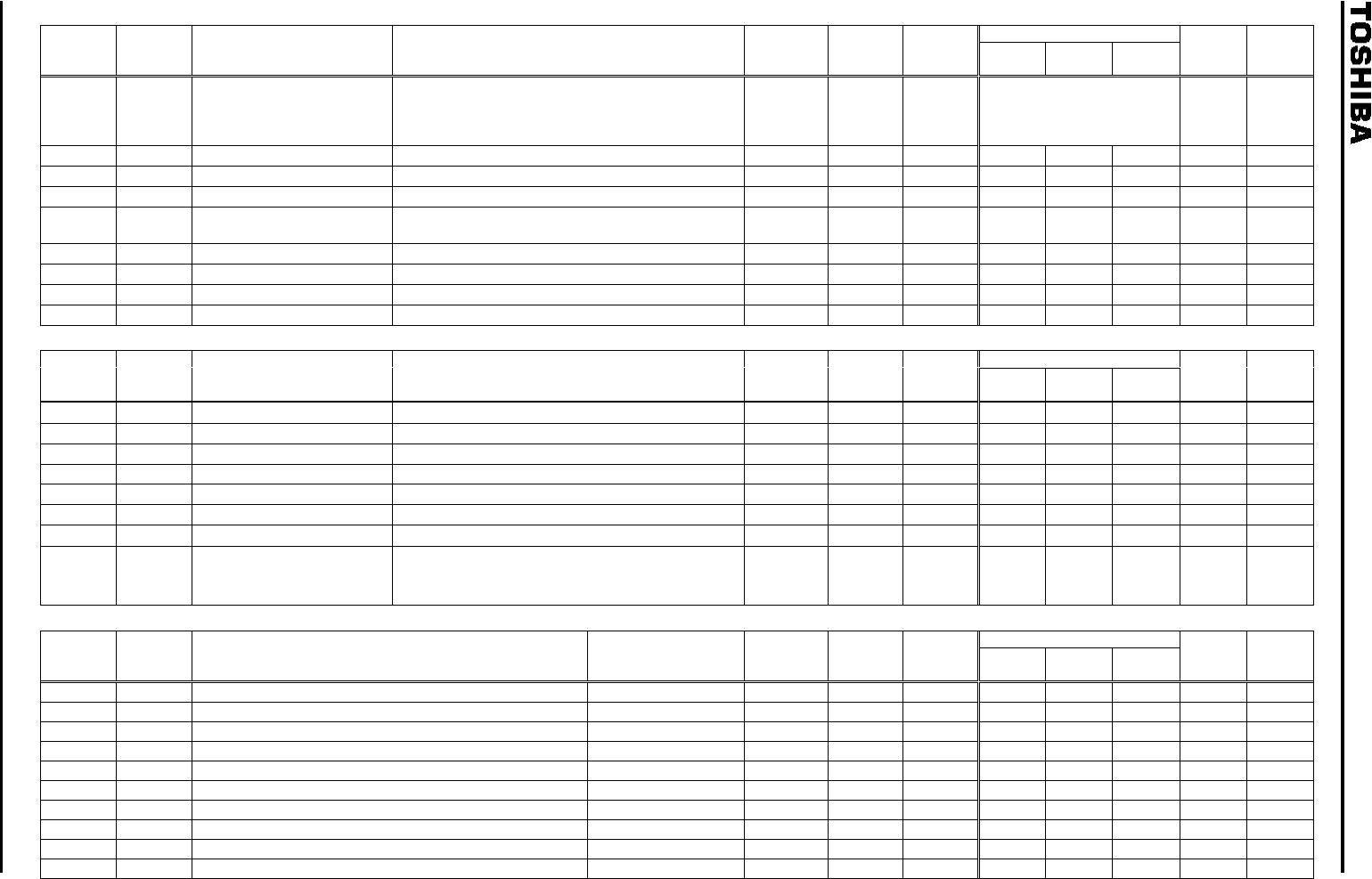
[16] Functions for lift (1/2)
Vector control
Title
Communi
cation No
Function Adjustment range
Min. unit (panel/
communication)
Default
setting
Write during
running
Speed
control
To rque
control
Position
control
V/f
Constant
Reference
section
0330 Light-load high-speed operation 0 10 0 Disabled /
0331
Light-load high-speed operation switching lower limit frequency
30.0 [Hz] 0.01/0.01 40.0 Enabled /
0332 Light-load high-speed operation load waiting time 0.0 10.0 [s] 0.1/0.1 1.0 Enabled /
0333 Light-load high-speed operation load detection time 0.0 10.0 [s] 0.1/0.1 1.0 Enabled /
0334 Light-load high-speed operation heavy load detection time 0.0 10.0 [s] 0.1/0.1 5.0 Enabled /
0335 Switching load torque current during forward run 0 250 [%] 1 50 Enabled /
0336 Heavy load torque during acceleration in forward direction 0 250 [%] 1 150 Enabled /
0337 Heavy load torque during fixed speed in forward direction 0 250 [%] 1 100 Enabled /
0338 Switching load torque current during reverse run 0 250 [%] 1 50 Enabled /
0339 Heavy load torque during acceleration in reverse direction 0 250 [%] 1 150 Enabled /
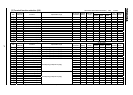
Sensorless vector/vector with sensor ( valid, :invalid)
(Reference section): Refer to the inverter's individual manual.