



















F-41
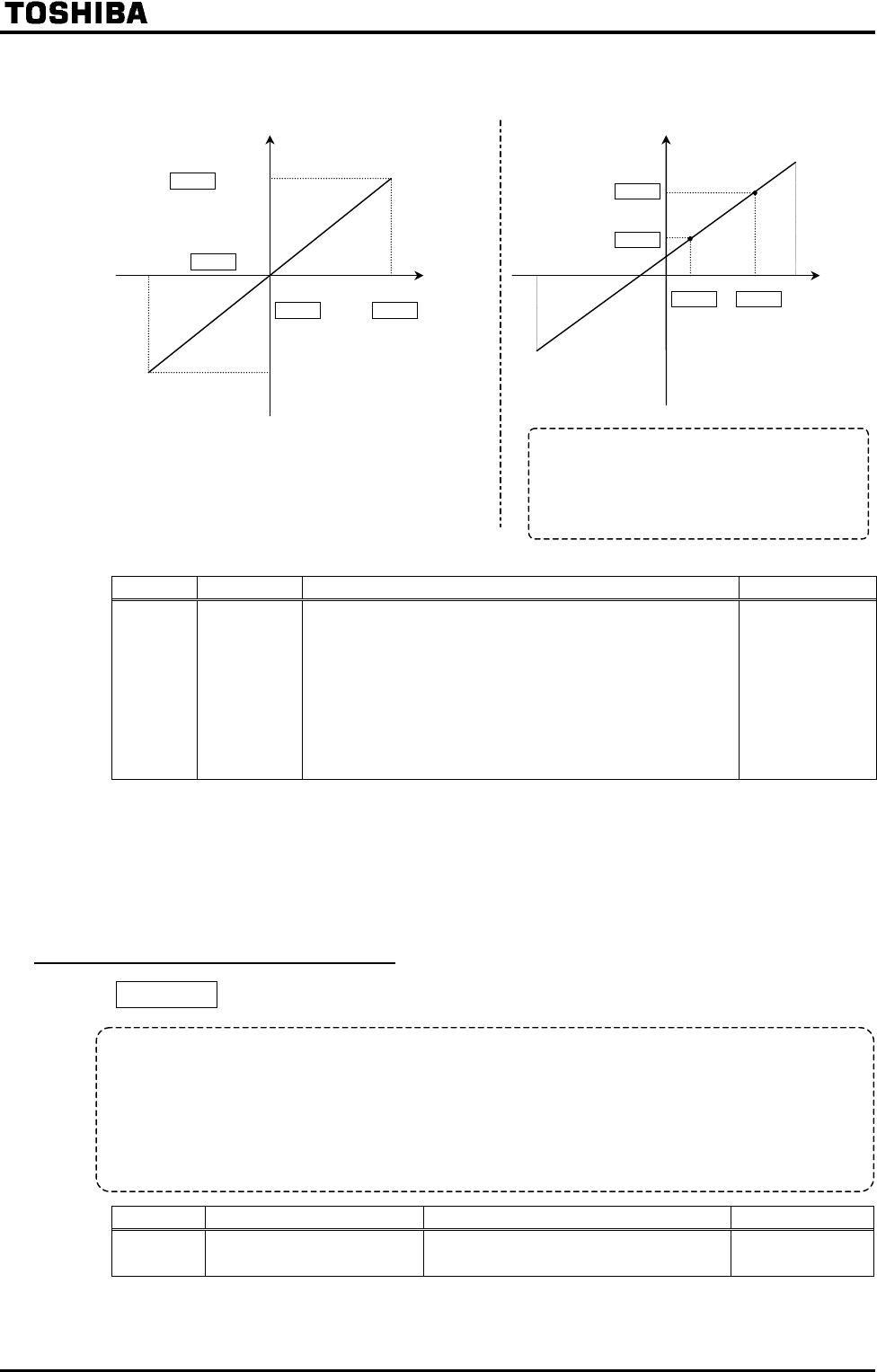
3) Voltage signal 0 10Vdc RX terminal
[Default setting] [Arbitrary setting]
Motor torque: -100% at -10Vdc, 0% at 0Vdc and
+100% at +10Vdc.
[Parameter setting]
Title Function Adjustment range Default setting
Torque
reference
selection
: VI/II
: RR
: RX
: RX2(option)
: Panel input
: Binary / BCD input(option)
: Common serial communication option(FA30)
: Serial communication RS485(FA32)
: Communication add-on cassette option(FA33)
Note1) Selecting 5 (Panel input) activates the control panel torque reference .
Note2) Use 2 phases input type sensor when torque control is operated by vector control
with a sensor.
Note3) For sensorless vector control, “forward power running reverse regeneration”
and “forward regeneration reverse power running“ cannot be operated.
Use vector control with a sensor (2 phases) for these uses.
6.21.2 Torque reference filter
Torque reference filter
Title Function Adjustment range Default setting
Torque reference filter
,
(without filter)
(without filter)
Motor torque [%]
Torque reference
0V
+100
-100
+10V
-10V
0% 100%
0
The relationship between the torque
command and the motor torque can be
changed. The and settings
0 and +/-20% correspond to voltages of
0 and +/-10Vdc, respectively.
Function
When a motor drives a load with large inertia or when the gain cannot be increased
because the machine is not rigid enough to allow it, the motor sometimes vibrates. In
such cases, this filter is used to reduce the vibration. The smaller the set value, the
larger effect the filter can exert. (The response of the motor decreases to reduce the
vibration.)
Motor torque [%]
Torque reference
0V
-10V
+10V