



















99
4
PARAMETERS
Position control
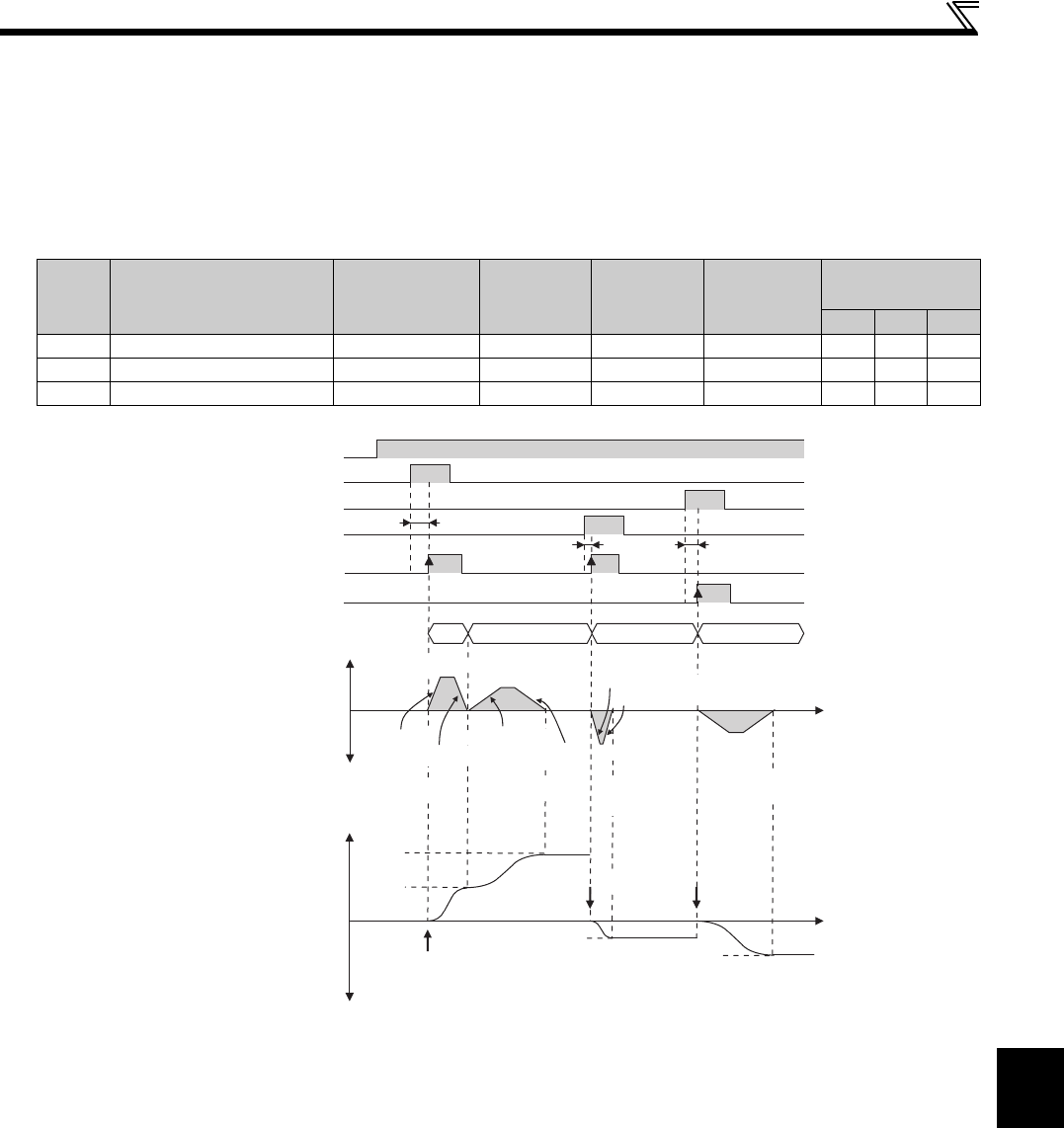
(3) Roll feed mode (Pr.537 = "1")
The current position and position command are set to 0 at start, and then position control is performed.
Because the current position and position command are set to 0 at start, position commands are not overflowed and the
repeated feed by the increment is available.
With this setting, no home position return is required.
The following shows an operation example with the parameter setting shown in the table below.
<Point table position control in the roll feed mode (Pr.537 = "1")>
The start command must remain ON for 20 ms or longer.
Wait for 5 ms or longer after the table selection signal is turned ON. Then, turn ON the start signal.
Point
table
Position data
[Before electronic gear]
Maximum
speed
Acceleration
time
Deceleration
time
Auxiliary
function
Table selection
signal
RH RM RL
1 Pr.465 = "1000", Pr.466 = "0" Pr.4 = "2000r/min" Pr.578 = "1s" Pr.579 = "1s" Pr.525 = "1"
2 Pr.467 = "1000", Pr.468 = "0" Pr.5 = "1500r/min" Pr.580 = "2s" Pr.581 = "2s" Pr.526 = "10"
3 Pr.469 = "500", Pr.470 = "0" Pr.6 = "2000r/min" Pr.582 = "1s" Pr.583 = "1s" Pr.527 = "100"
ON
ON
ON
ON
ON
ON
Servo-ON (SON)
or pre-excitation (LX)
Table selection (RH)
Table selection (RM)
Table selection (RL)
Forward rotation start (STF)
Reverse rotation start (STR)
Target position
[before electronic gear]
1000 2000 -500 -1000
-500
-1000
0 clear
2000
1000
Pr.5 = 1500r/min
ON
Speed command
0
0
Current position
[before electronic gear]
0 clear
0 clear
Slope set by Pr.579
Slope set by Pr.581
Pr.6 = 2000r/min
Pr.4 = 2000r/min
Time
time
∗2
∗2
∗2
∗1
∗1
Travel distance
= 1000
Travel distance
= 1000
Travel distance
= -500
Travel distance
= -1000
Slope set by Pr.582
Slope set by Pr.583
Slope set by Pr.578
Slope set by Pr.580