



















78
Speed control
4.4 Speed control
4.4.1 Outline of speed control
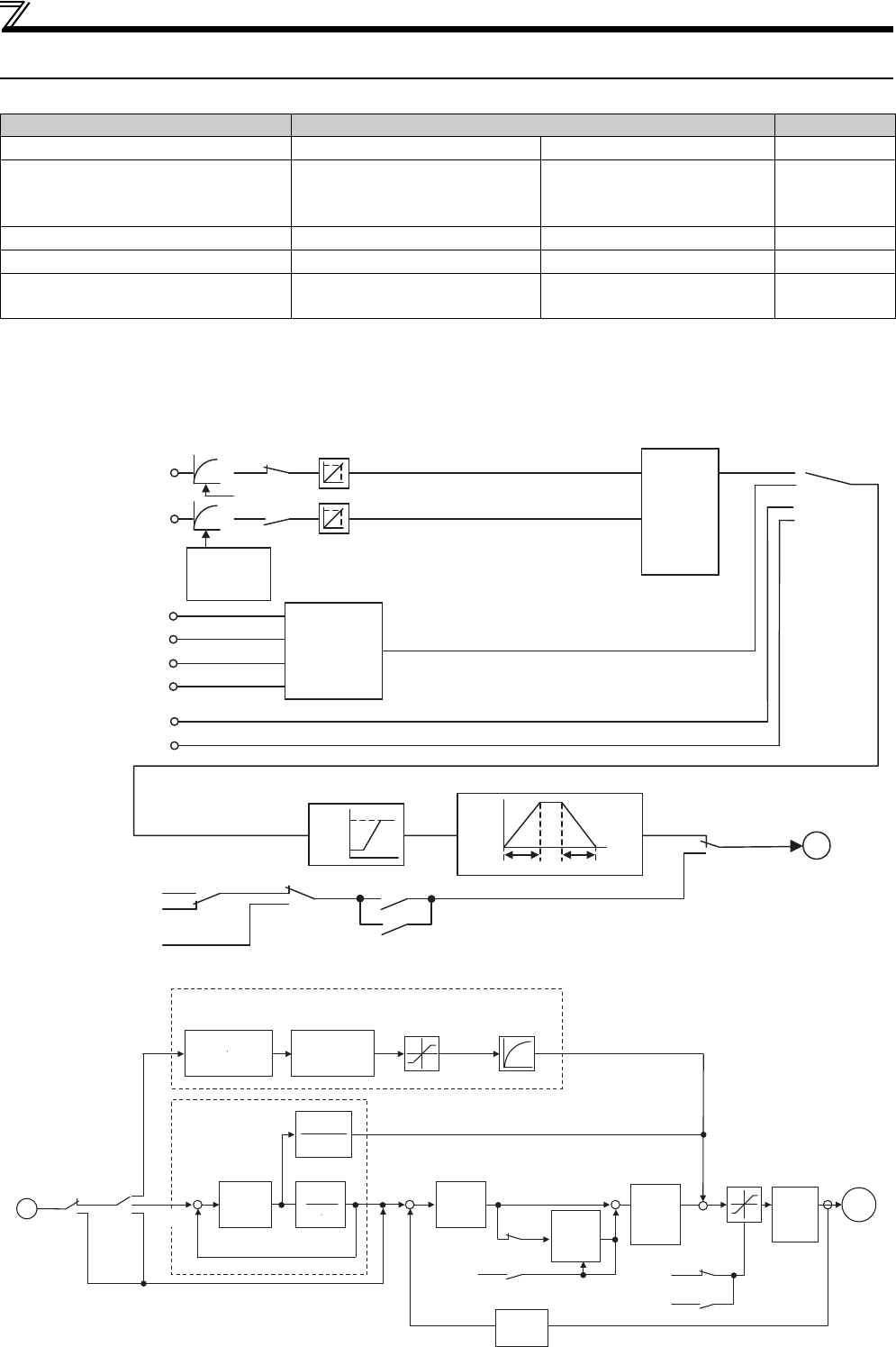
(1) Control block diagram
Purpose Parameter to set Refer to page
To adjust gain for speed control Gain adjustment Pr.820, Pr.821
80
To enhance the trackability of the
motor in response to a speed
command change
Speed feed forward control,
model adaptive speed control
Pr.828, Pr.877 to Pr.881
83
To avoid mechanical resonance Notch filter Pr.862, Pr.863, Pr.871
85
To adjust gain for PM motor control Gain adjustment Pr.730, Pr.824, Pr.825
86
To improve the acceleration/
deceleration characteristics
Wiring resistance Pr.658
87
Terminal 2
Terminal 4
Option
Operation panel
Terminal 2 bias [C2, C3 (Pr.902 )]
Terminal 2 gain [Pr.125, C4 (Pr.903 )]
Terminal 4 bias [C5, C6 (Pr.904 )]
Terminal 4 gain [Pr.126, C7 (Pr.905 )]
Operation Mode
[Pr.79 ]
Servo lock
Zero speed control
Maximum/minimum setting
Acceleration/deceleration processing
[Pr.802 = 1]
[Pr.802 = 0]
SON/LX
Running
During stop
Decelerates to stop
[Pr.11 ]
RL
RM
RH
REX
AU
AU
Terminal 4
input
selection
[Pr.267]
DC Injection
A
MM-GKR motor
S-PM geared
motor
Multi-speed
selection
[Pr.4 to 6,
24 to 27,
232 to 239 ]
Speed setting
filter [Pr.74 ]
Analog
input
selection
[Pr.73]
[Pr.1]
[Pr.2]
[Pr.7 ]
[Pr.8 ]
Speed feed forward control
Model adaptive
speed control
Speed feed forward
torque limit
[Pr.879 ]
Speed feed
forward
filter [Pr.878 ]
Model speed
calculation
Integration cleared to 0
[Pr.877 = 1]
[Pr.877 = 0]
+
-
Torque limit
[Pr.22 ]
[Pr.48 ]
0
X44
X44
RT
RT
Speed
estimation
[Pr.730 ]
Motor
Torque
control
[Pr.824 ]
[Pr.825 ]
Notch
filter
[Pr.862 ]
[Pr.863 ]
[Pr.871 ]
Speed
control
integral
time
[Pr.821 ]
Speed
control
P gain
[Pr.820 ]
Torque
coefficient
Model speed
control gain
[Pr.828 ]
Load inertia ratio
J s
[Pr.880 ]
Speed feed
forward gain
[Pr.881 ]
J [Pr.880 ]
[Pr.877 = 2]
A
1
J s
+
-
+
+
+
+
MM-GKR motor
S-PM geared
motor