



















97
4
PARAMETERS
Position control
Set the function of the target position data in Pr.525 to Pr.531 auxiliary function.
"Continuous" cannot be set in Pr.531 Seventh positioning sub-function.
To perform position control, turn ON the SON signal or the LX signal. For the SON signal and the LX signal, refer to
page
131.
To input the SON signal, set "86" in any of Pr.178 to Pr.184 (input terminal function selection) to assign the function to a
terminal.
To input the LX signal, set "23" in any of Pr.178 to Pr.184 (input terminal function selection) to assign the function to a
terminal.
When performing position control, always perform the home position return. However, the home position return is not
required when the roll feed mode (Pr.537 = "1") is selected. For the home position return, refer to page 104.
When the start signal (STF signal or STR signal) is turned ON, the selection of the point table (RH, RM, or RL) is
determined and position shift is started.
When an increment command is selected and the STR signal is used as a start signal, the sign of position data is
reversed. When an increment command is selected, the sign of position data is not reversed even if the STR signal is
used as a start signal.
When an increment command is used and the target position is set out of the command data setting range (-99999999 to
99999999), the target position is regarded as 99999999 (for plus) or -99999999 (for minus) to continue the position
control.
(2) Operation example
The following shows an operation example with the parameter setting shown in the table below.
<Point table position control based on the absolute position (Pr.537 = "0")>
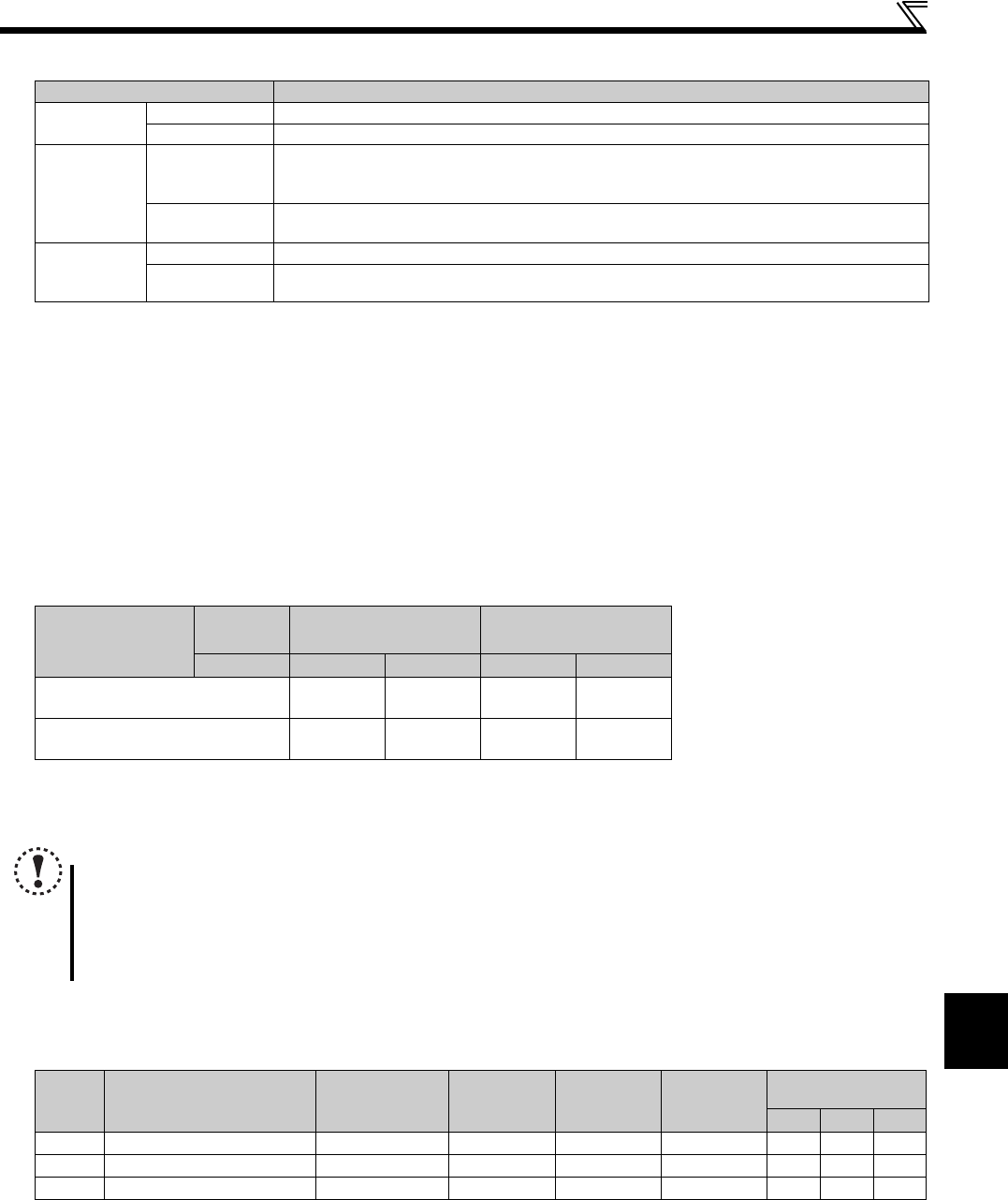
Item Description
Sign
Plus Sets the target position data as a plus value.
Minus Sets the target position data as a minus value.
Command
method
Absolute
position
command
A command is given based on the absolute position from the home position. Position commands
cannot be received until the completion of the home position return.
(The position control is not performed.)
Increment
command
A command is given based on increments from the current position.
Continuous
operation
Independent Positioning is performed once according to one selected point table.
Continuous
After positioning is completed, another positioning is performed continuously according to the
next point table.
Auxiliary function
setting
(Pr.525 to Pr.531)
Command
method
Increment command
Absolute position
command
Sign Plus Minus Plus Minus
Forward rotation command
(STF signal)
Plus Minus Plus Minus
Reverse rotation command
(STR signal)
Minus Plus Plus Minus
NOTE
Do not set 0 r/min in the maximum speed of the point table (Pr.4 to Pr.6 and Pr.24 to Pr.27). If 0r/min is set, no position
command is created and the stop state remains. In such a case, turn OFF the SON signal (or LX signal), and then
perform the home position return again.
The priorities of the external signals are "JOG signal (JOG) > JOG signal 2 (JOG2) > point table selection signal (RH,
RM, or RL).
The Pr.13 Starting speed setting is ignored.
Point
table
Position data
[Before electronic gear]
Maximum
speed
Acceleration
time
Deceleration
time
Auxiliary
function
Table selection
signal
RH RM RL
1 Pr.465 = "1000", Pr.466 = "0" Pr.4 = "2000r/min" Pr.578 = "1s" Pr.579 = "1s" Pr.525 = "1"
2 Pr.467 = "1000", Pr.468 = "0" Pr.5 = "1500r/min" Pr.580 = "2s" Pr.581 = "2s" Pr.526 = "10"
3 Pr.469 = "500", Pr.470 = "0" Pr.6 = "2000r/min" Pr.582 = "1s" Pr.583 = "1s" Pr.527 = "100"