















73
4
PARAMETERS
PM sensorless vector control
4.3 PM sensorless vector control
4.3.1 Outline of PM sensorless vector control
A dedicated PM (magnet) motor is a highly efficient motor compared to an induction motor. With this PM motor, highly efficient
motor control and highly accurate motor speed control can be performed.
Without using a speed detector such as an encoder, the motor speed is detected based on the output voltage and current of
the drive unit, and highly accurate speed control and position control can be performed.
4.3.2 Automatic parameter setting in accordance with the motor (Pr.998)
The above parameters can be set when Pr.160 Extended function display selection = "0". (Refer to page 182)
The setting differs according to the drive unit capacity. (0.75K or lower / 1.5K or higher)
The setting is available only with the 0.1K to 0.75K class.
The setting is available only with the 0.2K to 3.7K class.
.......Specifications differ according to the date assembled. Refer to page 316 to check the SERIAL number.
(1) PM parameter initialization (Pr.998)
When Pr.998 ="3024 or 6004", the monitor is displayed and the speed is set using the motor rotations per minute.
To use frequency to display or set, set Pr.998 ="3124 or 6104".
POINT
The following conditions must be met to perform PM sensorless vector control.
For the motor model, dedicated PM motor must be used.
A specified combination of the motor capacity and the drive unit capacity must be used.
Single-motor operation (one motor run by one drive unit) must be performed.
The overall wiring length with the motor must be 30m or less.
NOTE
In the low-speed range (about 100 r/min or lower), rotation ripple occurs due to cogging torque of the motor.
The RUN signal is output about 100 ms after turning ON the start command (STF, STR). The delay is due to the
magnetic pole detection.
Performing PM parameter initialization automatically adjusts the parameter initial settings and setting ranges required to drive the
PM motor being used.
Initialization is performed by setting Pr.998 PM parameter initialization or by choosing the mode on the operation panel.
Parameter
number
Name
Initial
value
Setting
range
Operation
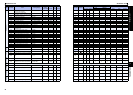
998
PM parameter
initialization
3024/
6004
3024 Parameter settings for an MM-GKR motor (rotations per minute)
3124
Parameter settings for an MM-GKR motor (frequency)
6004
Parameter settings for an S-PM geared motor (rotations per minute)
6104
Parameter settings for an S-PM geared motor (frequency)
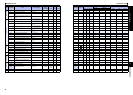
Pr.998 setting Description
Operation after selecting the parameter
setting mode on the operation panel
3024 Parameter settings for an MM-GKR motor (rotations per minute)
(PM) write "3024"
3124 Parameter settings for an MM-GKR motor (frequency) Not available
6004 Parameter settings for an S-PM geared motor (rotations per minute)
(PM) write "6004"
6104 Parameter settings for an S-PM geared motor (frequency) Not available
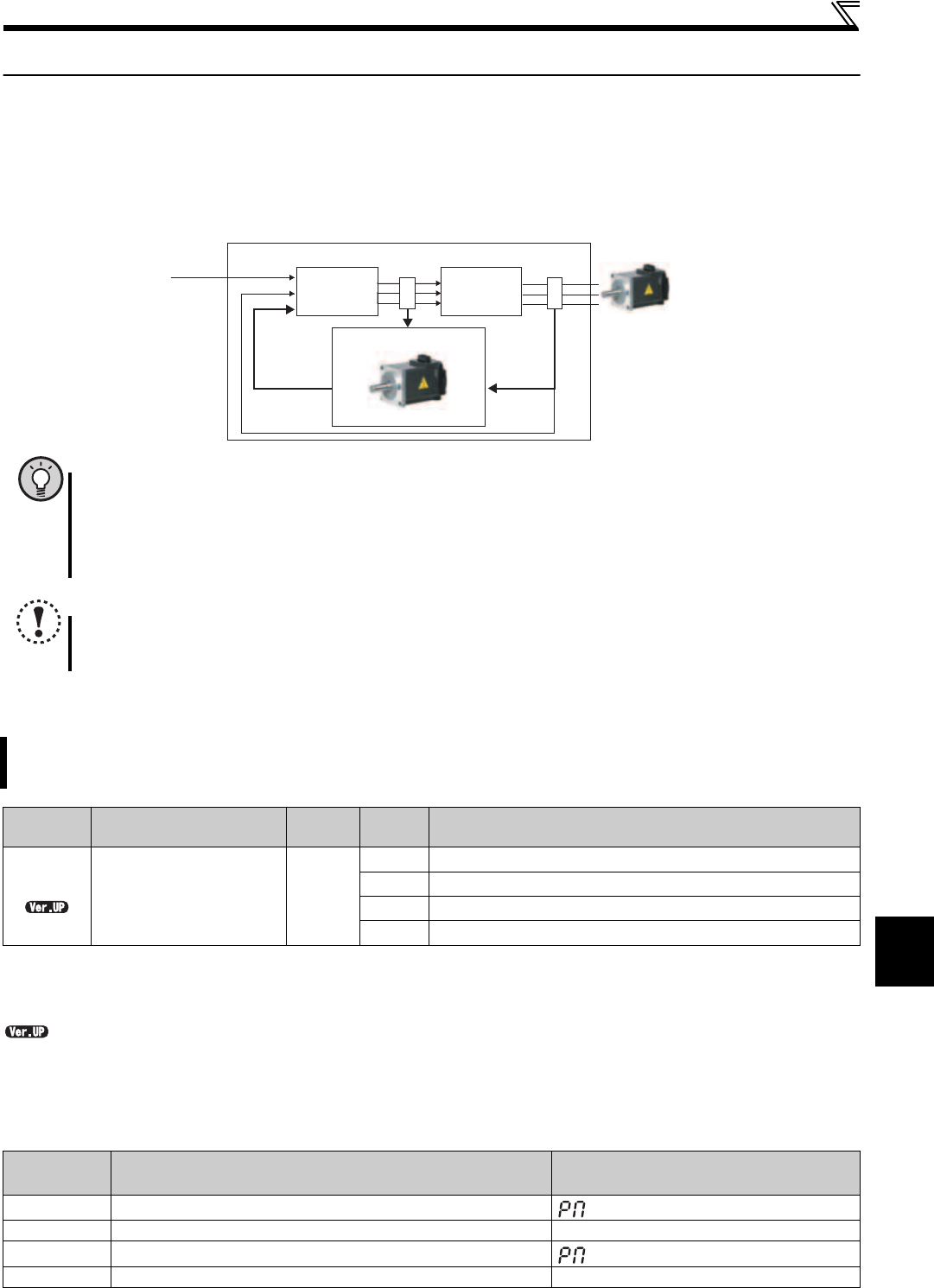
PM sensorless vector control image
Inverter
circuit
Controller
Output
current
Output
voltage
Drive unit
Virtual motor
Magnetic field observer
Speed
command
∗
Speed/magnetic
pole position
A magnetic field observer is a control
method that calculates the motor speed/
magnetic pole position based on the
motor voltage and current of a virtual
motor which is set up in the drive unit.