



















139
Function assignment of external terminal and control
4
PARAMETERS
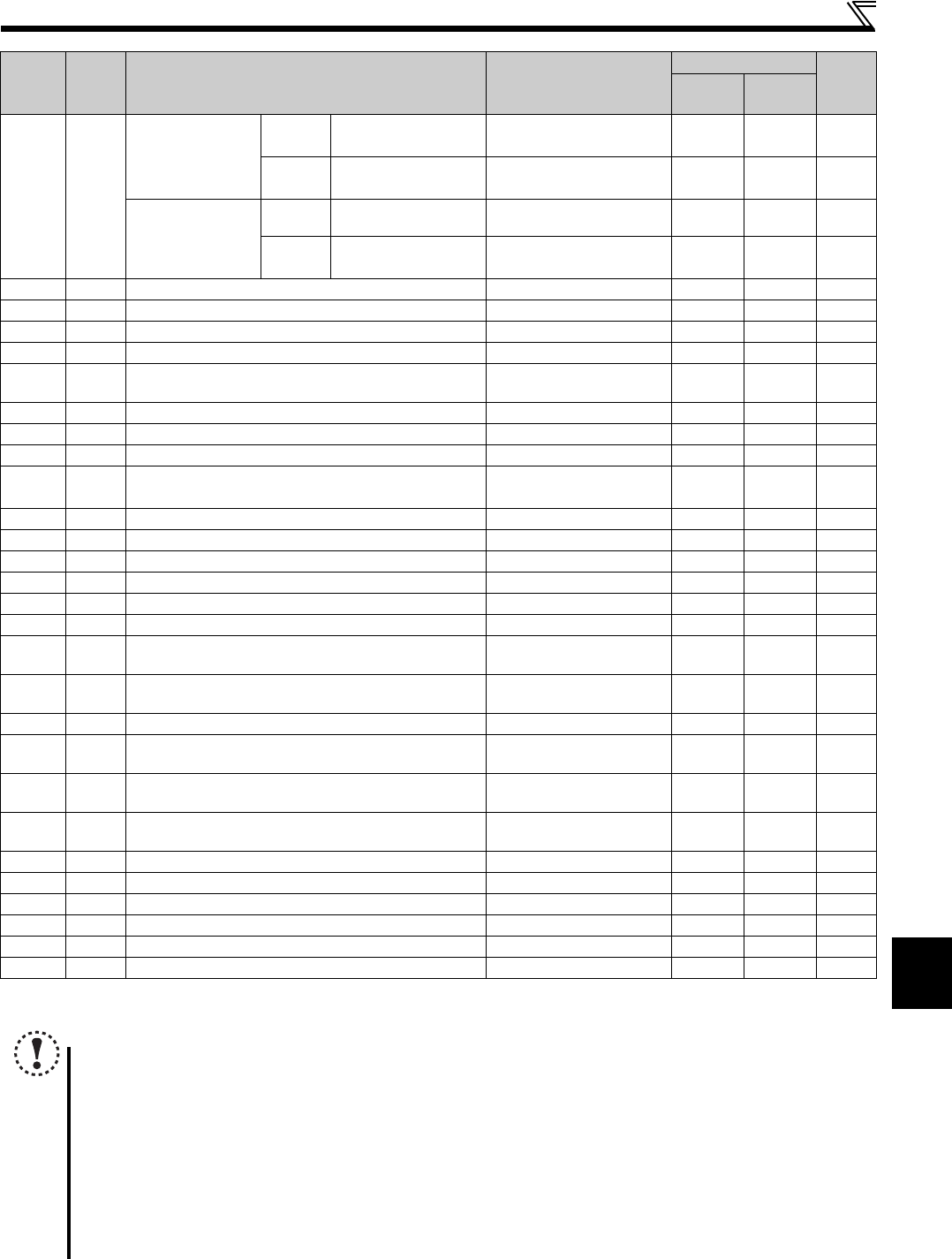
When Pr.59 Remote function selection "0", the functions of the RL, RM and RH signals are changed as given in the table.
The OH signal turns ON when the relay contact "opens".
2RH
Pr.59 = 0 (initial
value)
Speed
control
High-speed operation
command
Pr.4 to Pr.6, Pr.24 to Pr.27,
Pr.232 to Pr.239
117
Position
control
Table selection signal
Pr.4 to Pr.6, Pr.24 to Pr.27,
Pr.465 to Pr.478, etc.
95
Pr.59 0
Speed
control
Remote setting
(acceleration)
Pr.59 122
Position
control
Table selection signal
Pr.4 to Pr.6, Pr.24 to Pr.27,
Pr.465 to Pr.478, etc.
95
3 RT Second function selection Pr.44, Pr.45, Pr.48 141
4 AU Terminal 4 input selection Pr.267 168
5 JOG Jog operation selection Pr.15, Pr.16 119
7 OH External thermal relay input Pr.9 130
8REX
15-speed selection (combination with three speeds RL,
RM, RH)
Pr.4 to Pr.6, Pr.24 to Pr.27,
Pr.232 to Pr.239
117
10 X10
Drive unit run enable signal (FR-HC2, FR-CV connection)
Pr.30, Pr.70 136
12 X12 PU operation external interlock Pr.79 186
14 X14 PID control valid terminal Pr.127 to Pr.134 235
16 X16
PU-External operation switchover (turning ON X16
selects External operation)
Pr.79, Pr.340 192
23 LX Pre-excitation Pr.11 132
24 MRS Output stop Pr.17 140
25 STOP Start self-holding selection 142
29 X29 Stopper control switchover Pr.512 to Pr.515 102
30 JOG2 JOG operation selection 2 Pr.15, Pr.16 119
44 X44 P/PI control switchover (P control with X44-ON) Pr.820, Pr.821 80
60 STF
Forward rotation command (assigned to STF terminal
(Pr.178) only)
142
61 STR
Reverse rotation command (assigned to STR terminal
(Pr.179) only)
142
62 RES Drive unit reset
65 X65
PU/NET operation switchover (turning ON X65 selects
PU operation)
Pr.79, Pr.340 192
66 X66
External/NET operation switchover (turning ON X66
selects NET operation)
Pr.79, Pr.340 192
67 X67
Command source switchover (turning ON X67 makes
Pr.338 and Pr.339 commands valid)
Pr.338, Pr.339 195
76 X76 Proximity dog Pr.532 107
86 SON Servo-ON Pr.802 132
87 X87 Position control sudden stop Pr.464, Pr.535 100
88 LSP Forward stroke end Pr.464, Pr.535 101
89 LSN Reverse stroke end Pr.464, Pr.535 101
9999 No function
NOTE
Changing the terminal assignment using Pr.178 to Pr.184 (input terminal function selection) may affect the other functions.
Set parameters after confirming the function of each terminal.
Same function can be assigned to two or more terminals. In this case, the logic of terminal input is OR.
The priorities of the speed commands are in order of JOG (JOG2) > multi-speed setting (RH, RM, RL, REX) > PID (X14).
When the X10 signal (FR-HC2, FR-CV connection-drive unit operation enable signal) is not set or when the PU
operation external interlock (X12) signal is not assigned with Pr.79 Operation mode selection set to "7", the MRS signal
shares this function.
Same signal is used to assign multi-speed (7 speeds) and remote setting. They cannot be set individually.
(Same signal is used since multi-speed (7 speeds) setting and remote setting are not used to set speed at the same time.)
Turning the AU signal ON makes terminal 2 (voltage input) invalid.
Setting Signal Function Related parameters
: Valid/: Invalid
Refer
to
page
Speed
control
Position
control