






















88
Position control
4.5 Position control
4.5.1 Outline of position control
(1) Position control specifications
Turning OFF the power or the SON signal (LX signal) eliminates the home position. After turning ON the power or the SON signal (LX signal), always perform
the home position return. (For the roll feed, the home position return operation is not required.)
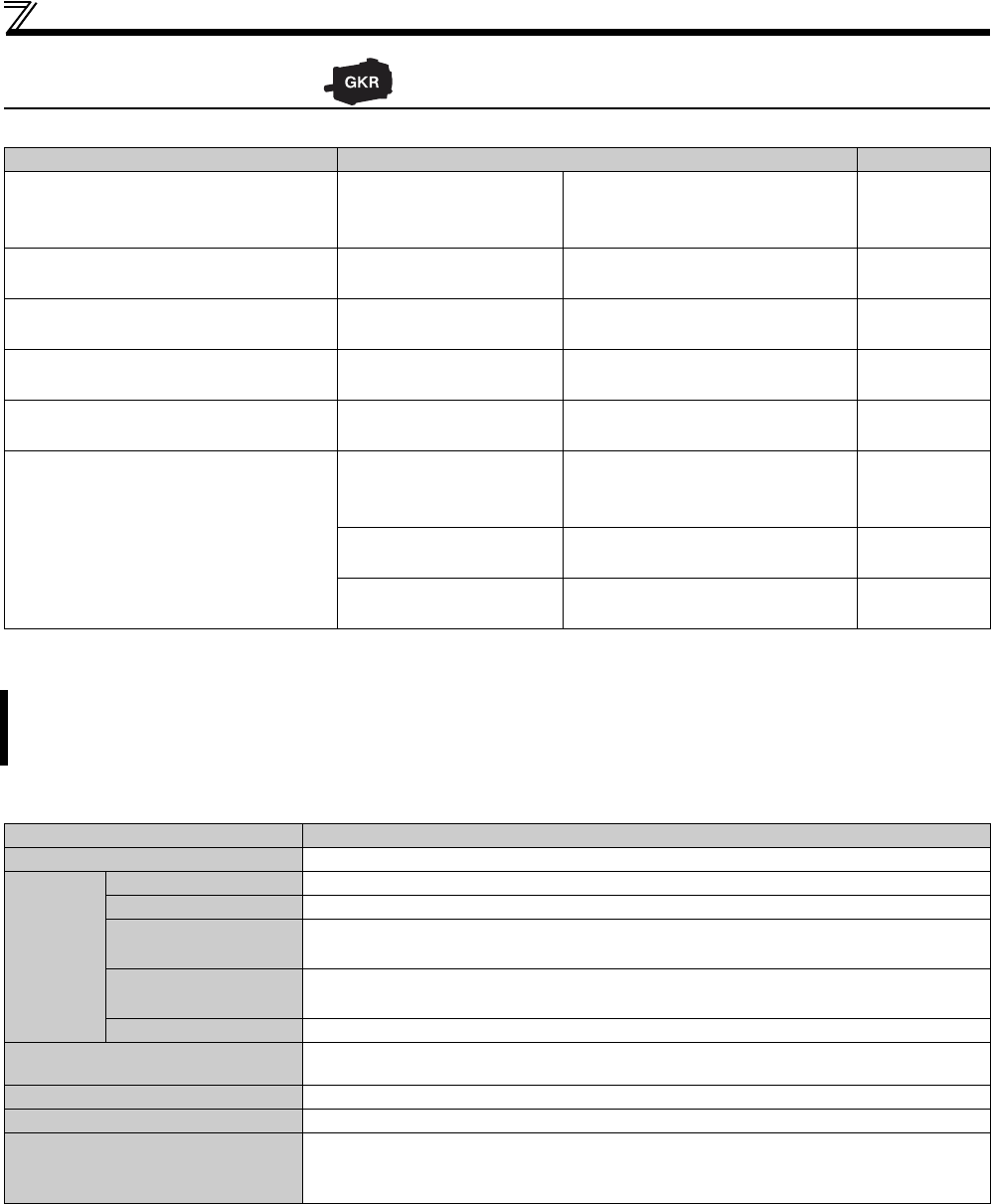
Purpose Parameter to set Refer to page
To perform simple position control by
setting parameters
Parameter position
command
Pr.4 to Pr.6, Pr.24 to Pr.27,
Pr.465 to Pr.478, Pr.525 to Pr.531,
Pr.537, Pr.578 to Pr.591
95
To perform stop operation under
position control
Position control sudden
stop and stroke end
Pr.464, Pr.535
100
To perform more accurate
positioning
Stopper control function Pr.512 to Pr.515
102
To select the home position return
method under position control
Position control home
position return
Pr.110, Pr.111, Pr.453, Pr.455,
Pr.508, Pr.509, Pr.532 to Pr.534
104
To relate the position command to
actual travel distance
Electronic gear settings Pr.420, Pr.421
108
To improve the precision of the
position control
Settings of the
positioning adjustment
parameters
Pr.426, Pr.506, Pr.507, Pr.510,
Pr.511, Pr.536
109
Position control gain
adjustment
Pr.422, Pr.423, Pr.427, Pr.446,
Pr.463, Pr.698, Pr.877
92
Speed control gain
adjustment
Pr.820, Pr.821
80
Under position control, a speed command is calculated to eliminate the difference between the position command and
the current position for rotating the motor.
The position control is available when an MM-GKR motor is used.
Item Specifications
Position command input method
Point table method
Command
method
Interface
Input terminal selection, RS-485 communication, CC-Link communication (plug-in option)
Number of points
7 points
Command data setting
range
-99999999 to 99999999
Command setting
method
Absolute position command with sign, increment command with sign
Electronic gear ratio
1/900 to 900
Home position return method
Data set type, stopper type, ignore the home position (servo-ON position home position), count
type with front end reference
Motor internal command resolution
5120 [kpulses/rev]
Positioning accuracy
1.8° (Mechanical angle: Equivalent to the resolution of 200 [pulses/rev])
Other positioning functions
Sudden stop function, stroke end detection function, roll feed mode, JOG operation, stopper
control function, pulse monitor selection function, position control rotation direction selection
function