






















197
Selection of operation mode and operation location
4
PARAMETERS
(3) Controllability through communication
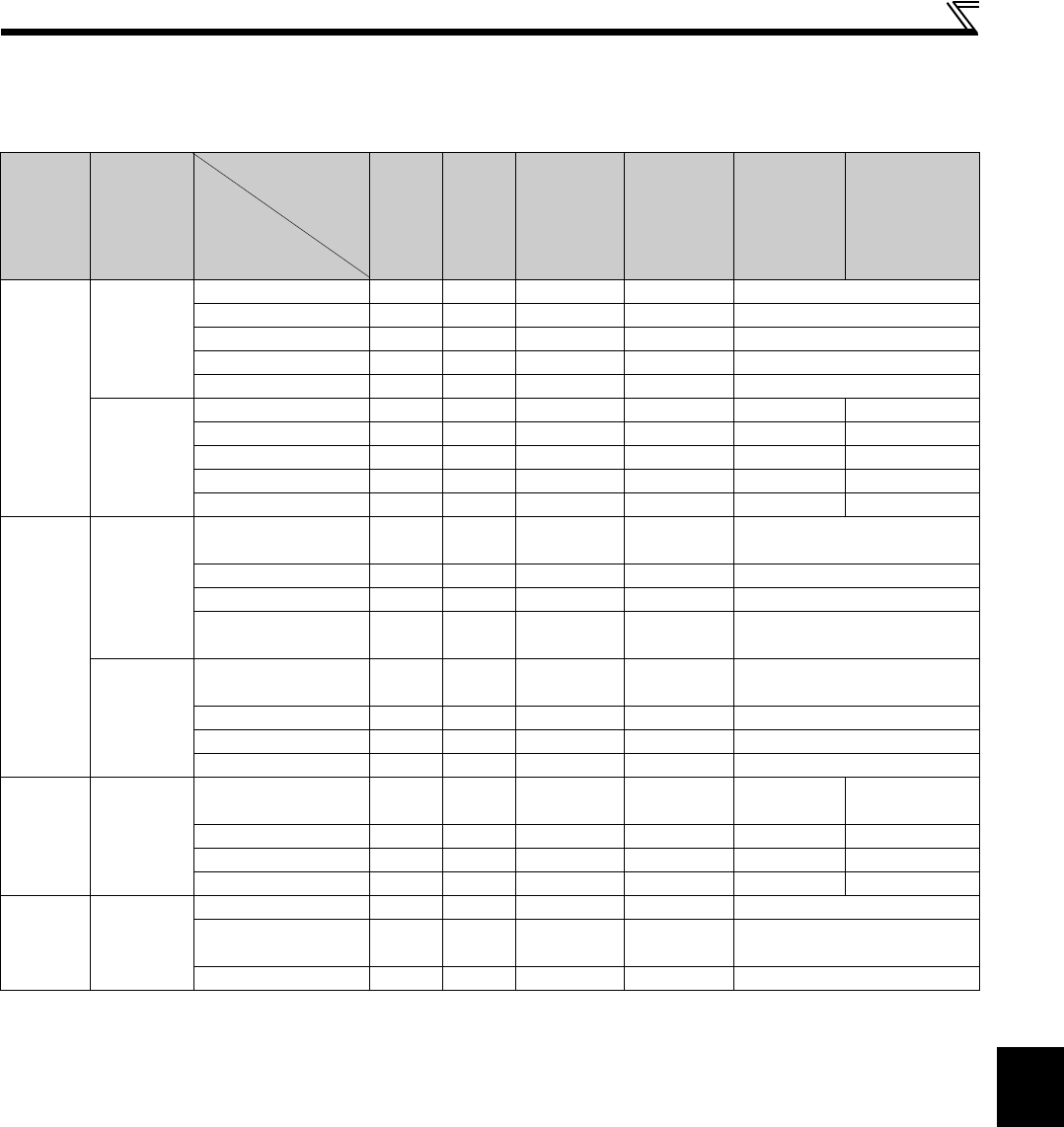
Controllability through communication in each operation mode is shown below.
Monitoring and parameter read can be performed from any operation regardless of operation mode.
As set in Pr.338 Communication operation command source and Pr.339 Communication speed command source. (Refer to page 195)
At occurrence of RS-485 communication error, the drive unit cannot be reset from the computer.
Enabled only when stopped by the PU. At a PU stop, PS is displayed on the operation panel. As set in Pr.75 PU stop selection. (Refer to page 178)
Some parameters may be write-disabled according to the Pr.77 Parameter write selection setting and operating status. (Refer to page 181)
Some parameters are write-enabled independently of the operation mode and command source presence/absence. When Pr.77 = 2, write is enabled.
(Refer to the parameter list on page 52) Parameter clear is disabled.
When Pr.550 NET mode operation command source selection = "2" (PU connector valid) or Pr.550 NET mode operation command source selection = "9999" and the
communication option is fitted.
When Pr.550 NET mode operation command source selection = "0" (communication option valid) or Pr.550 NET mode operation command source selection = "9999"
and the communication option is fitted.
Available with multi-speed setting and terminal 4-5 (valid when AU signal is ON).
Operation
Location
Condition
(Pr.551
Setting)
Operation
Mode
Item
PU
Operation
External
Operation
External/PU
Combined
Operation
Mode 1
(Pr.79 =3)
External/PU
Combined
Operation
Mode 2
(Pr.79 =4)
NET
Operation
(When Using
PU
Connector)
NET Operation
(When Using
Communication
Option)
Control by
RS-485
communica
tion from
PU
connector
2
(PU connector)
Run command (start)
Run command (stop)
Running speed setting
Parameter write
Drive unit reset
Other than
the above
Run command (start)
Run command (stop)
Running speed setting
Parameter write
Drive unit reset
Operation
from the
USB
connector
3
(USB
connector)
9999
(automatic
recognition)
Run command
(start, stop)
Running speed setting
Parameter write
Drive unit reset
Other than
the above
Run command
(start, stop)
Running speed setting
Parameter write
Drive unit reset
Control by
communica
tion from
communica
tion option
Run command
(start, stop)
Running speed setting
Parameter write
Drive unit reset
Control
circuit
external
terminals
Drive unit reset
Run command
(start, stop)
Speed setting
: Enabled, : Disabled, : Some are enabled