



















122
Speed setting by external terminals
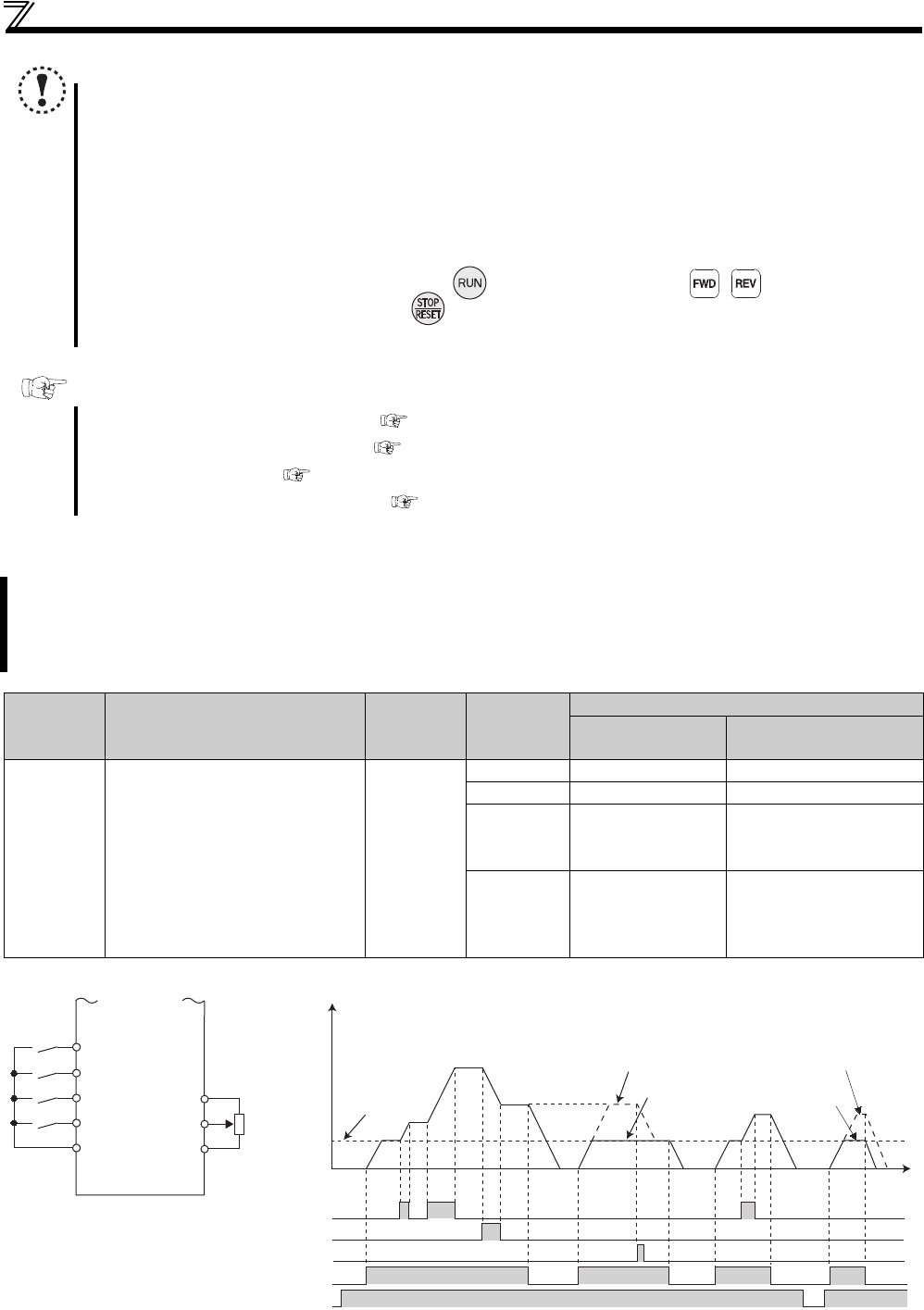
4.8.3 Remote setting function (Pr.59)
The above parameter can be set when Pr.160 Extended function display selection = "0". (Refer to page 182)
External running speed (other than multi-speed) or PU running speed
NOTE
The Pr.15 setting should be equal to or higher than the Pr.13 Starting speed. If "0r/min" is set in Pr.15 under position
control, no position command is created and the stop state remains.
The JOG signal (JOG2 signal) can be assigned to the input terminal using any of Pr.178 to Pr.184 (input terminal function
selection). When terminal assignment is changed, the other functions may be affected. Set parameters after confirming
the function of each terminal.
During Jog operation, the second acceleration/deceleration via the RT signal cannot be selected. (The other second
functions are valid. (Refer to page 141))
When Pr.79 Operation mode selection = "4", pressing of the operation panel and / of the parameter unit
(FR-PU07) starts the drive unit and pressing stops the drive unit.
This function is invalid when Pr.79 = "3".
Parameters referred to
Pr.29 Acceleration/deceleration pattern selection Refer to page 129
Pr.20 Acceleration/deceleration reference speed Refer to page 125
Pr.79 Operation mode selection Refer to page 186
Pr.178 to Pr.184 (input terminal function selection) Refer to page 138
Even if the operation panel is located away from the enclosure, you can use contact signals to perform continuous
variable-speed operation, without using analog signals.
By merely setting this parameter, you can use the acceleration, deceleration and setting clear functions of the
motorized speed setter (FR-FK).
Parameter
number
Name Initial value
Setting
range
Description
RH, RM, RL signal
function
Speed setting
storage function
59 Remote function selection
0
0 Multi-speed setting —
1 Remote setting With
2 Remote setting
Not used
(Turning the power OFF
clears remotely-set speed.)
3 Remote setting
Not used
(Turning the power OFF or
STF/STR OFF clears
remotely-set speed.)
Forward rotation
Acceleration
Deceleration
Clear
Drive unit
Connection diagram
for remote setting
STF
RH
RM
RL
SD
10
2
5
0
ON
ON
ON
ON
ON
ON
ON
ON
ON
ON ON
Deceleration
(RM)
Clear (RL)
Acceleration
(RH)
(STF)
Power supply
0r/min
Time
Rotation speed (r/min)
∗
When Pr.59 =1
When Pr.59 =2, 3
When Pr.59 =1, 2
When Pr.59 =3
Forward rotation