



















91
4
PARAMETERS
Position control
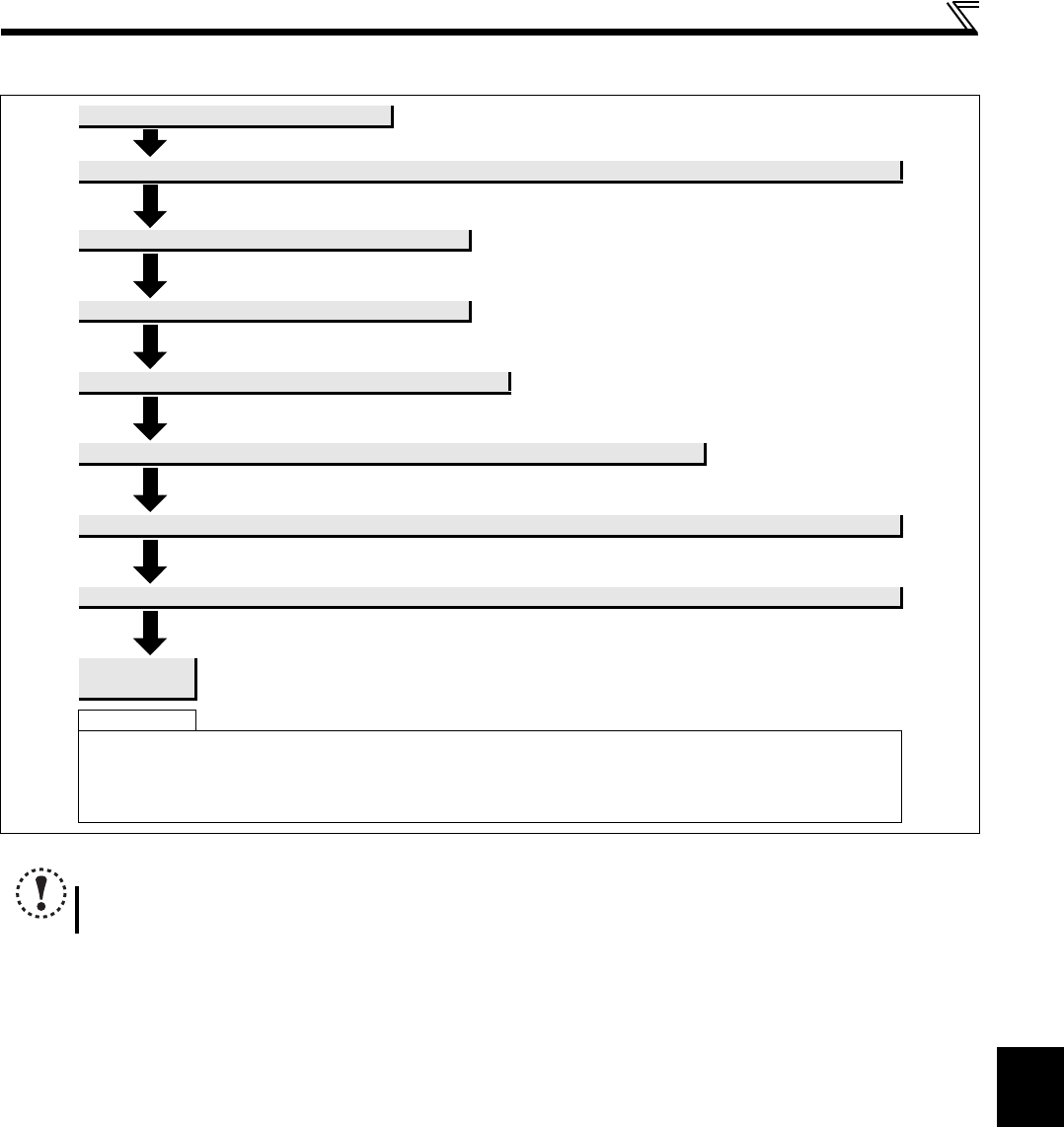
4.5.2 Setting procedure of position control
Perform secure wiring. (Refer to page 90)
Change the parameter settings to the initial value in accordance with the applied motor. (Pr.998) (Refer to page 73)
"3024": Parameter settings for an MM-GKR motor (rotations per minute)
"3124": Parameter settings for an MM-GKR motor (frequency)
Select the control method. (Pr.800) (Refer to page 75)
Set Pr.800="13" to enable position control.
Motor rotation direction (Pr.463) (Refer to page 92)
Set the position pulse increase/decrease direction in Pr.463.
Electronic gear settings (Pr.420, Pr.421) (Refer to page 108)
Selection of I/O signals (Pr.178 to Pr.184, Pr.190 to Pr.192) (Refer to page 138, 144)
Assign "86 (SON signal)" or "23 (LX signal)" in one of Pr.178 to Pr.184.
Home position return settings (Pr.110, Pr.111, Pr.453, Pr.455, Pr.508, Pr.509, Pr.532 to Pr.534) (Refer to page 104)
Set the pattern, shift distance, and others for the home position return.
Set the parameters for positioning (Pr.465 to Pr.478, Pr.525 to Pr.531, Pr.537, Pr.578 to Pr.591) (Refer to page 95)
Set the target position, maximum speed, acceleration/deceleration time, and
auxiliary function.
Test run
As required
JOG operation (Refer to page 119)
Settings of the position adjustment parameters (Refer to page 109)
Speed control gain setting (Refer to page 80)
Position control gain adjustment (Refer to page 92)
NOTE
When position control is selected (Pr.800="13") for an S-PM motor (Pr.998="6004 or 6104"), the operation is performed
under speed control.