



















104
Position control
4.5.7 Home position return under position control (Pr.110, Pr.111, Pr.453, Pr.455, Pr.508,
Pr.509, Pr.532 to Pr.534)
(1) Home position return pattern selection (Pr.532)
Use Pr.532 to set a pattern of home position return. The following operation is performed according to the control mode.
To perform home position return, turn ON the start signal (STF signal or STR signal) without selecting a point table and
JOG operation (RH, RM, RL, and JOG are OFF).
Home position return is started when the start signal (STF signal or STR signal) is turned ON (at the leading edge).
For PM sensorless vector control, position detection is not performed by a sensor such as an encoder but by energizing
the motor. Thus, turning OFF the SON signal or the LX signal eliminates the home position. After turning ON the SON
signal (LX signal), always perform the home position return. In addition, when the power is turned OFF, the home position
is eliminated. After turning ON the power, always perform the home position return.
Under speed control, home position return cannot be performed. To perform home position return, always select the
position control mode.
Determine the home position for the position control. Position control with an absolute position cannot be performed
until the home position is set.
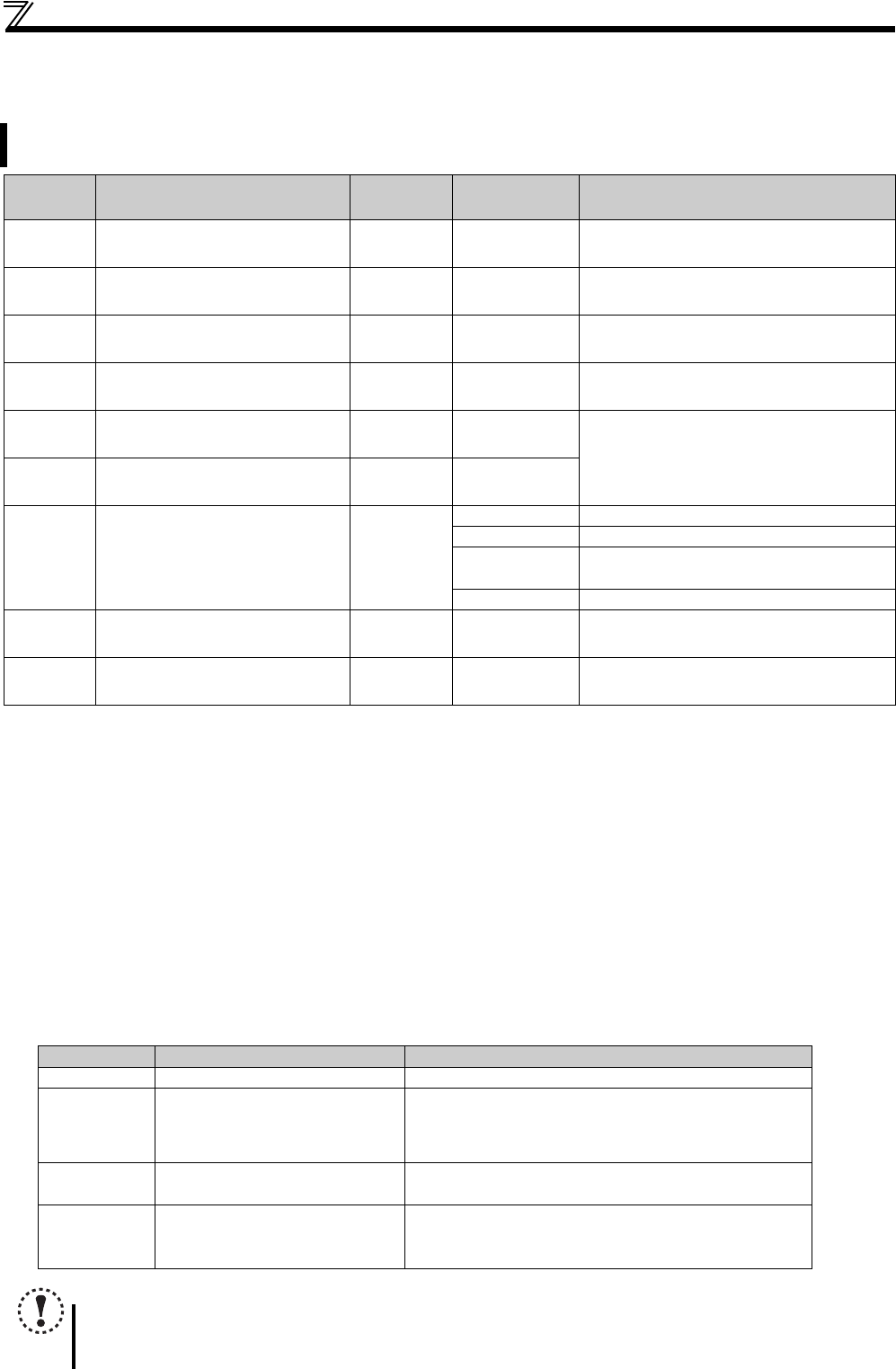
Parameter
number
Name
Initial
value
Setting
range
Description
110
Acceleration time for home
position return
5s 0.01 to 360s Set an acceleration time from 0r/min to Pr.20.
111
Deceleration time for home
position return
5s 0.01 to 360s Set a deceleration time from Pr.20 to 0r/min.
453
High speed during home
position return
300r/min 0 to 4800r/min
Maximum speed at high-speed home position
return
455
Home position return shifting
speed
1500r/min 0 to 4800r/min Maximum speed at home position return
508
Home position shift amount
lower 4 digits
0 0 to 9999
Set an offset value to shift the home position.
509
Home position shift amount
upper 4 digits
0 0 to 9999
532
Home position return
selection
4
2 Data set type
3 Stopper type
4
Ignoring the home position (servo-ON position
as the home position)
6 Count type with front end reference
533
Home position return stopper
torque
40% 0 to 200%
Set a torque limit for the pressing home position
return.
534
Home position return stopper
duration
0.5s 0 to 10s
Set a pressing time for the pressing home
position return.
The above parameters can be set when Pr.160 Extended function display selection = "0". (Refer to page 182)
When a value exceeding 3000 r/min is set, the rotation speed will be limited at 3000 r/min.
Also, when an S-PM geared motor is used, the maximum setting value differs depending on the drive unit capacity. (0.2 to 2.2K: 12000 r/min, 3.7K: 8000
r/min)
Pr.532 setting Type Description
2 Data set type Set a position as the home position.
3 Stopper type
Home position return is performed pressing a workpiece on
the machine end.
The home position return direction can be selected. The home
position shift distance can be set.
4
Ignoring the home position (servo-
ON position as the home position)
The servo-ON position is used as the home position.
6 Count type with front end reference
The front end of the proximity dog is set as the home position.
The home position return direction can be selected. The home
position shift distance can be set.
NOTE
Turning OFF the power or the SON signal (LX signal) eliminates the home position. After turning ON the power or the
SON signal (LX signal), always perform the home position return. (For the roll feed, the home position return
operation is not required.)