



















303
7
SPECIFICATIONS
Common specifications
7.2 Common specifications
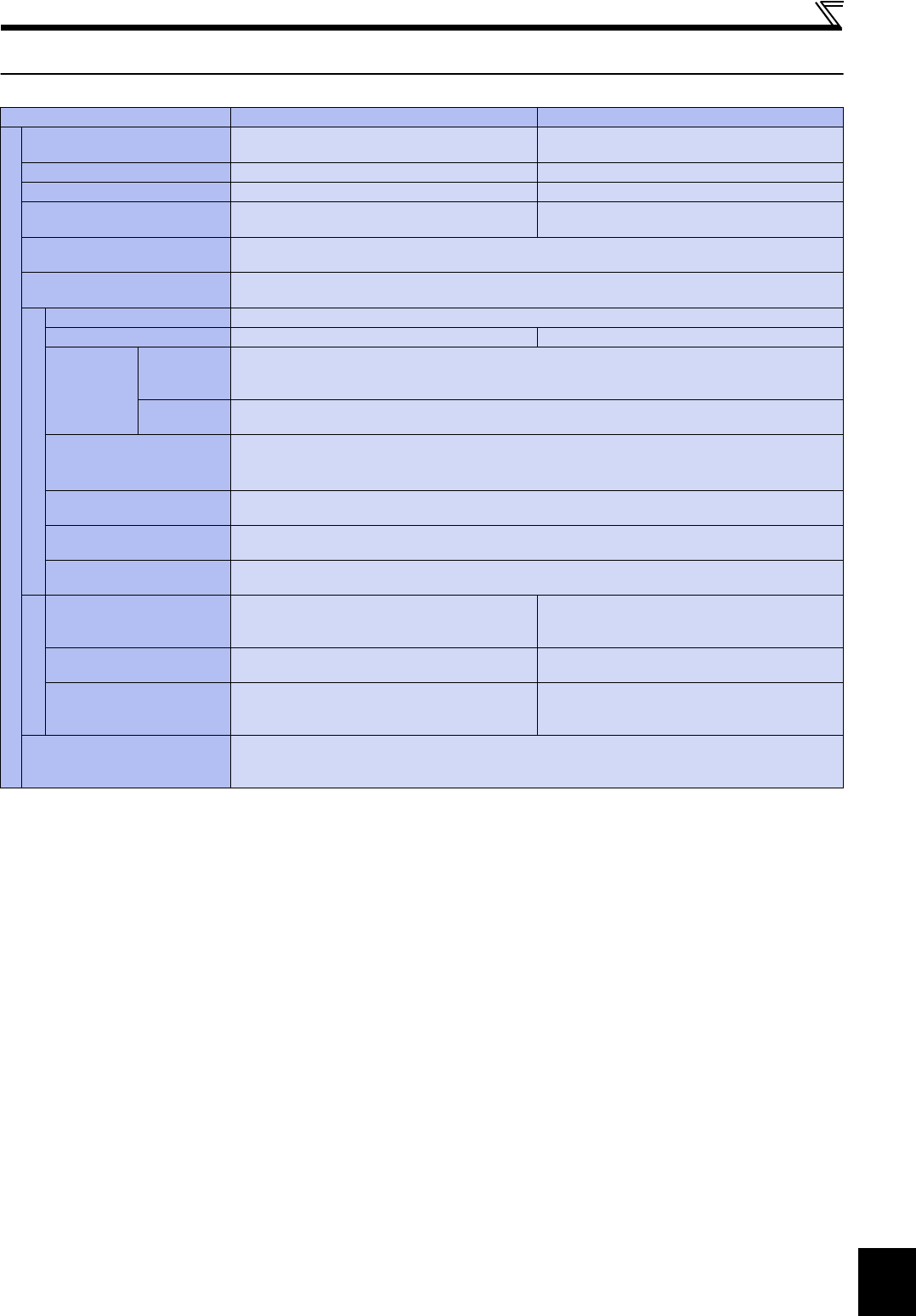
Motor MM-GKR motor S-PM geared motor
Control specifications
Control method
PM sensorless vector control (low-speed range:
current synchronization operation)
PM sensorless vector control (low-speed range:
current synchronization operation)
Carrier frequency
10kHz (when driving an MM-GKR motor) 5kHz
Starting torque
200% (initial value) 100% (initial value)
Torque boost
PM control torque boost, DC injection brake
torque boost
Initial magnetic pole
detection time
Approx. 0.1s (performed at start, at SON/LX signal ON.)
Torque limit operation level
Operation current level can be set (0 to 200% adjustable), whether to use the function or not can be
selected.
Speed control
Speed fluctuation ratio
±0.05%
Speed control range
Full speed range (speed ratio at digital input 1:1000)
PM sensorless vector control range 1:10
Speed
setting
resolution
Analog
input
3r/min/3000r/min (terminal2, 4: 0 to 10V/10-bit)
6r/min/3000r/min (terminal2, 4: 0 to 5V/9-bit)
3r/min/3000r/min (terminal4: 0 to 20mA/10-bit)
Digital
input
1r/min
Analog speed command
input
Two terminals
Terminal 2: 0 to 10V, 0 to 5V can be selected
Terminal 4: 0 to 10V, 0 to 5V, 4 to 20mA can be selected
Acceleration/
deceleration time setting
0.01 to 360.00s (acceleration and deceleration can be set individually).
Acceleration/
deceleration time pattern
Selectable between the linear acceleration/deceleration and the S-pattern acceleration/deceleration
Digital speed command
input
Input from the operation panel or parameter unit. Frequency setting increment is selectable.
Position control
Command input method
Point table method. Position control by an
absolute position command is available after
home position return.
Motor internal command
resolution
5120 [pulses/rev]
Positioning accuracy
1.8° (mechanical angle of 200 [pulses/rev]
resolution equivalent; input voltage of 200V; and
wiring length of 5m or less)
Communication
specification
Built-in to the drive unit : RS-485 communication (Mitsubishi inverter protocol, Modbus-RTU
communication)
Option: CC-Link communication