



















92
Position control
4.5.3 Gain adjustment of position control
(Pr.422, Pr.423, Pr.427, Pr.446, Pr.463, Pr.698, Pr.877)
(1) Position loop gain (Pr.422)
Make adjustment when any of such phenomena as unusual vibration, noise and overcurrent of the motor/machine
occurs.
Increasing the setting improves trackability for the position command and also improves servo rigidity at a stop, but
oppositely makes an overshoot and vibration more liable to occur. The droop pulse amount is determined according to
the following formula.
With the actual speed response of 100 rad/s (sec
-1
) to 200 rad/s (sec
-1
), set Pr.422 so that the position control gain is 1/
10 to 1/3 of the actual speed response. As a guideline, normally set the position control gain in a range between 5 to 50
rad/s (sec
-1
).
Example) With the actual speed response of 200 rad/s, when setting Pr.422 to 1/10 of the speed response
Pr.422 = 200rad/s(sec
-1
)1/10 = 20rad/s(sec
-1
)
(2) Position feed forward gain (Pr.423, Pr.877 = "1")
This function is designed to cancel a delay caused by the droop pulses.
When the position response or speed response (trackability of the speed command) is low, adjust Pr.423.
Set a small value in Pr.423 first, and then increase the value gradually until the target position response or speed
response is acquired. Set this parameter within the range where an overshoot or vibration will not occur. The guideline
value is approximately 90%.
This function has no effects on servo rigidity at a stop.
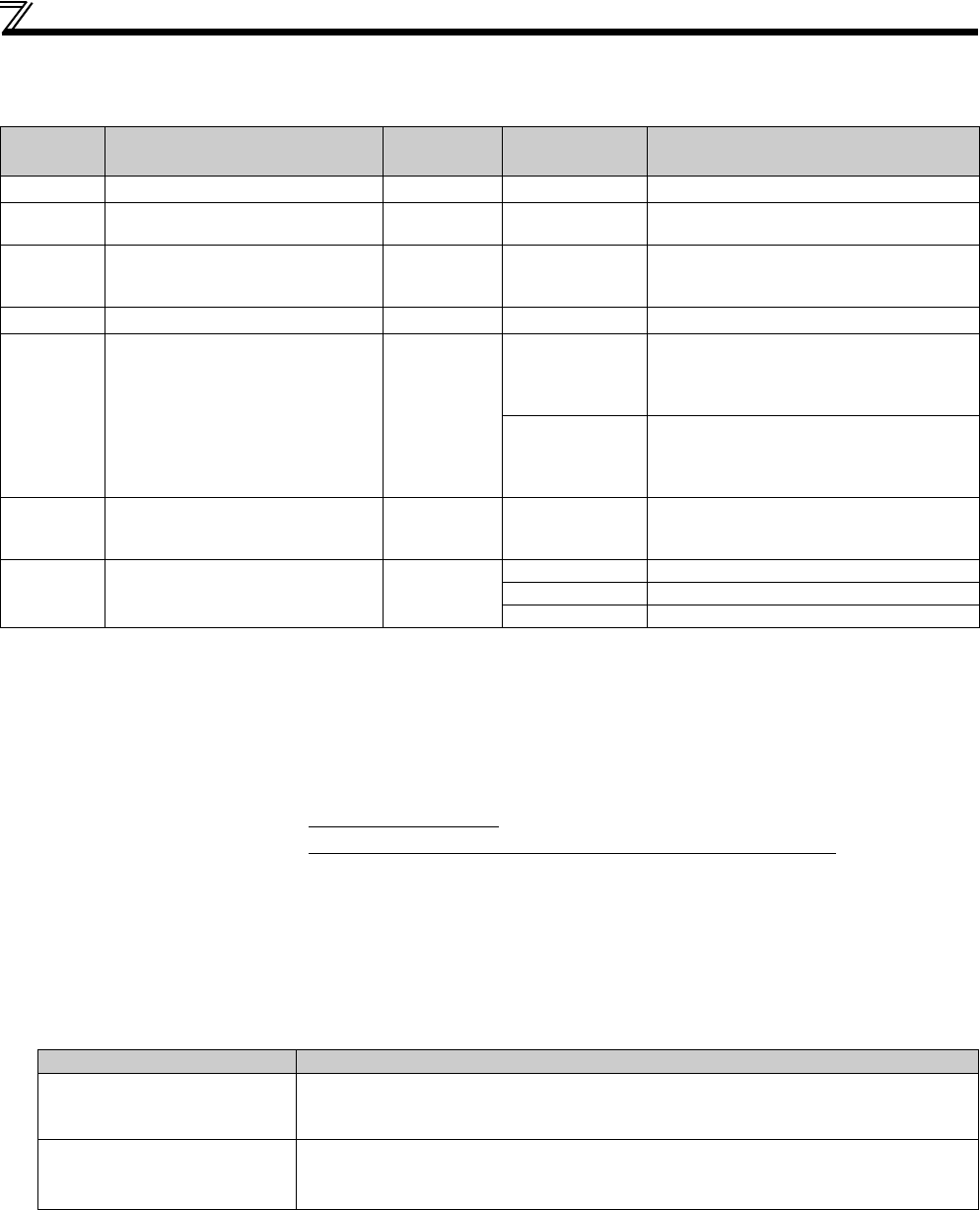
Parameter
number
Name Initial value
Setting
range
Description
422 Position control gain
20sec
-1
0 to 150sec
-1
Set the gain of the position control.
423 Position feed forward gain
0% 0 to 100%
Function to cancel a delay caused by the
droop pulses.
427 Excessive level error
40K pulses 0 to 400K pulses
If the droop pulse [after the electronic gear]
exceeds the set value, the excessive position
error (E.OD) occurs.
446 Model position control gain
0sec
-1
0 to 150sec
-1
Set the gain for the model position controller.
463
Position control rotation
direction selection
0
0
The position pulse increases when the motor
rotates CCW.
The position pulse decreases when the motor
rotates CW.
1
The position pulse decreases when the motor
rotates CCW.
The position pulse increases when the motor
rotates CW.
698 Speed control D gain
0% 0 to 100%
Set the differential gain of speed control.
Valid only during positioning operation under
position control.
877
Feed forward control/model
adaptive control selection
0
0 Normal position control is performed.
1 Feed forward control is performed.
2 Model adaptive speed control is performed.
The above parameters can be set when Pr.160 Extended function display selection = "". (Refer to page 182)
Droop pulse amount (pulse) =
Rotation speed (r/min)
Motor internal command resolution
(5120 pulses/rev)
60
Pr.422 Position control gain (sec
-1
)
Phenomenon/Condition Pr.422 Adjustment
Slow response
Increase the setting value.
Increase the value 3rad/s(sec
-1
) by 3rad/s(sec
-1
) until just before an overshoot, stop-time
vibration or other instable phenomenon occurs, and set about 0.8 to 0.9 of that value.
Overshoot, stop-time vibration or
other instable phenomenon
occurs.
Decrease the setting value.
Decrease the value 3rad/s(sec
-1
) by 3rad/s(sec
-1
) until just before an overshoot, stop-time
vibration or other instable phenomenon does not occur, and set about 0.8 to 0.9 of that value.