



















207
Communication operation and setting
4
PARAMETERS
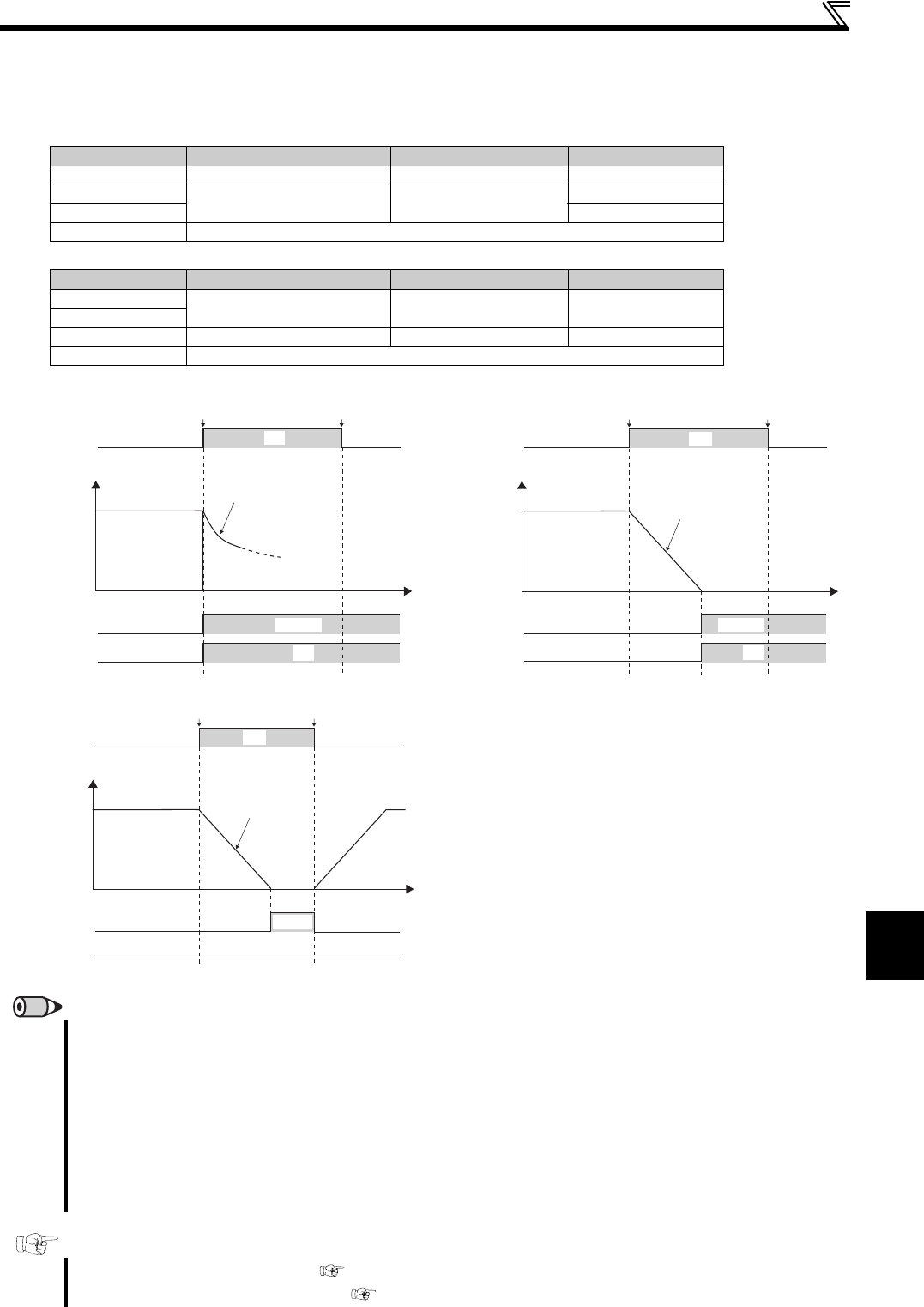
(3) Stop operation selection at occurrence of communication fault (Pr.502)
Stop operation when retry count excess (Mitsubishi inverter protocol only) or signal loss detection error occurs can be
selected.
Operation at fault occurrence
Operation at fault removal
Pr.502 Setting Operation Indication Fault Output
0 (initial value) Coasts to stop. E. PUE lit Provided
1
Decelerates to stop E. PUE lit after stop
Provided after stop
2 Not provided
3 Same as the setting "0"
Pr.502 Setting Operation Indication Fault Output
0 (initial value)
Kept provided E. PUE Kept provided
1
2 Automatic restart functions Normal display Not provided
3 Same as the setting "0"
Pr.502 setting "0 (initial value), 3" Pr.502 setting "1"
Pr.502 setting "2"
REMARKS
The fault output indicates fault output signal (ALM signal) or alarm bit output.
When the setting was made to provide a fault output, the fault description is stored into the faults history. (The fault description
is written to the faults history when a fault output is provided.)
When no fault output is provided, the fault record overwrites the fault indication of the faults history temporarily, but is not stored.
After the fault is removed, the fault indication returns to the ordinary monitor, and the faults history returns to the preceding fault
indication.
When the Pr.502 setting is "1 or 2", the deceleration time is the ordinary deceleration time setting (e.g. Pr.8, Pr.44, Pr.45). In
addition, acceleration time for restart is the normal acceleration time (e.g. Pr.7, Pr.44).
When "2" is set in Pr.502, run command/speed command at restarting follows the command before an fault occurrence.
When "2" is set in Pr.502 at occurrence of a communication error and the error is removed during deceleration, the motor
accelerates again at that point.
Parameters referred to
Pr.7 Acceleration time, Pr.8 Deceleration time Refer to page 125
Pr.190 to Pr.192 (output terminal function selection) Refer to page 144
Time
Communication
fault
Rotation speed
Fault display
(E.PUE)
Fault output
(ALM)
ONOFF OFF
Display
ON
OFF
Motor coasting
Fault occurrence Fault removal
Time
Communication
fault
Rotation speed
Fault display
(E.PUE)
Fault output
(ALM)
ONOFF OFF
Display
ONOFF
Decelerates to stop
Fault occurrence Fault removal
Time
Communication
fault
Rotation speed
Fault display
(E.PUE)
Fault output
(ALM)
ONOFF OFF
Display
OFF
Decelerates
to stop
Fault occurrence Fault removal