



















107
4
PARAMETERS
Position control
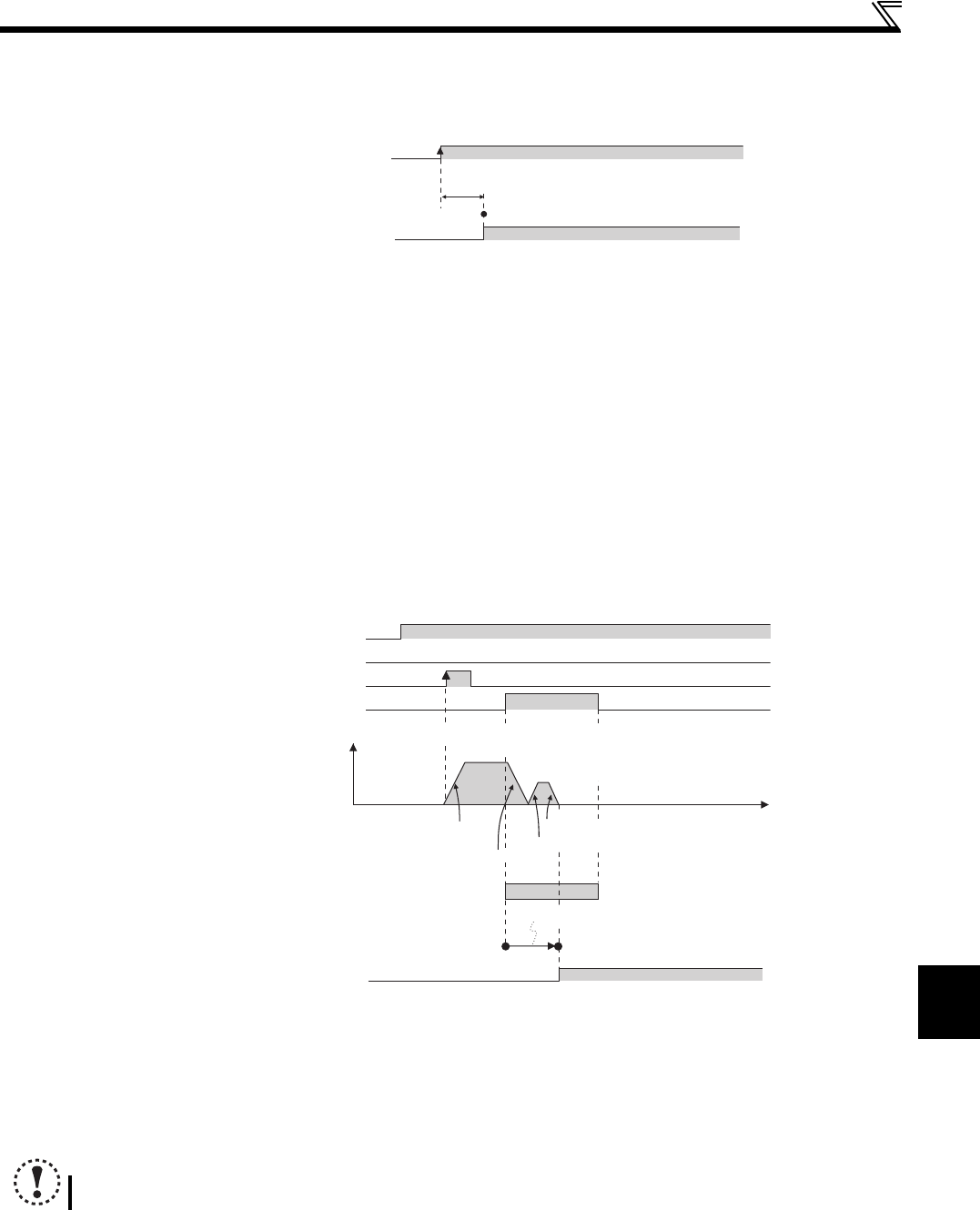
(5) Ignoring the home position (servo-ON position as the home position) (Pr.532 = "4")
The position at servo-ON (or pre-excitation) is set as the home position.
The home position shift distance (Pr.508 + Pr.509 ) is ignored.
(6) Count type with front end reference (Pr.532 = "6")
The home position is determined based on the detection position of the front end of the proximity dog (X76 signal).
Deceleration starts at the front end of the proximity dog, and the position after the shift by the home position shift distance
is set as the home position.
To input the X76 signal, set "76" in any of Pr.178 to Pr.184 (input terminal function selection) to assign the function to a
terminal.
Home position return is performed in the following procedure.
1) Input the forward rotation signal (STF signal) or reverse rotation signal (STR signal) without selecting a point table or
JOG operation to perform the operation according to Pr.453 High speed during home position return.
2) The position where the front end of the proximity dog is directed is set as the provisional home position, and the
operation decelerates to stop.
3) The position after the shift from the provisional home position by the home position shift distance is set as the home
position.
In the following conditions, the home position return setting error (HP1) is displayed.
The X76 signal is ON when shifting is started by Pr.453.
The X76 signal does not turn ON after the target position (99999999 or -99999999) is reached after the shifting started
by Pr.453.
The in-position signal (ZP) does not turn ON for 10 s after the home position shift distance is reached.
NOTE
The home position may differ depending on the acquisition timing of the X76 signal.
SON signal (LX signal)
Home position return completed signal (ZP)
ON
ON
Home position
Initial magnetic pole position detection
Approx. 100ms
SON signal (LX signal)
RH, RM, RL, JOG signal
STF signal
X76 signal
Speed
0
ON
ON
ON
Provisional home position Home position
Pr.508 + Pr.509 Home position shift distance
[before electronic gear]
Home position return completed signal (ZP)
Proximity dog
Slope set by Pr.7
Slope set by Pr.8
Slope set by Pr.110
Pr.453 High speed during home position return
Pr.455 Home position return shifting speed
Time
Slope set by Pr.110 (Pr.111)
1) 2) 3)