



















149
Function assignment of external terminal and control
4
PARAMETER
4.12.6 Detection of rotation speed (SU, FU signal, Pr.41 to Pr.43, Pr.870)
The drive unit rotation speed is detected and output at the output signals.
Parameter
number
Name
Initial
value
Setting range Description
41 Up-to-speed sensitivity
10% 0 to 100% Level where the SU signal turns ON.
42 Speed detection
180r/min 0 to 4800r/min Speed where the FU signal turns ON
43
Speed detection for reverse
rotation
9999
0 to 4800r/min
Speed where the FU signal turns ON during reverse rotation.
9999 Same as Pr.42 setting
870 Speed detection hysteresis
15r/min 0 to 180r/min Set the hysteresis width for the detected speed.
The above parameters can be set when Pr.160 Extended function display selection = "0". (Refer to page 182)
When a value exceeding 3000 r/min is set, the rotation speed will be limited at 3000 r/min.
Also, when an S-PM geared motor is used, the maximum setting value differs depending on the drive unit capacity. (0.2 to 2.2K: 12000 r/min, 3.7K: 8000
r/min)
When an S-PM geared motor is used, the maximum setting value differs depending on the drive unit capacity. (0.2 to 2.2K: 450 r/min, 3.7K: 300 r/min)
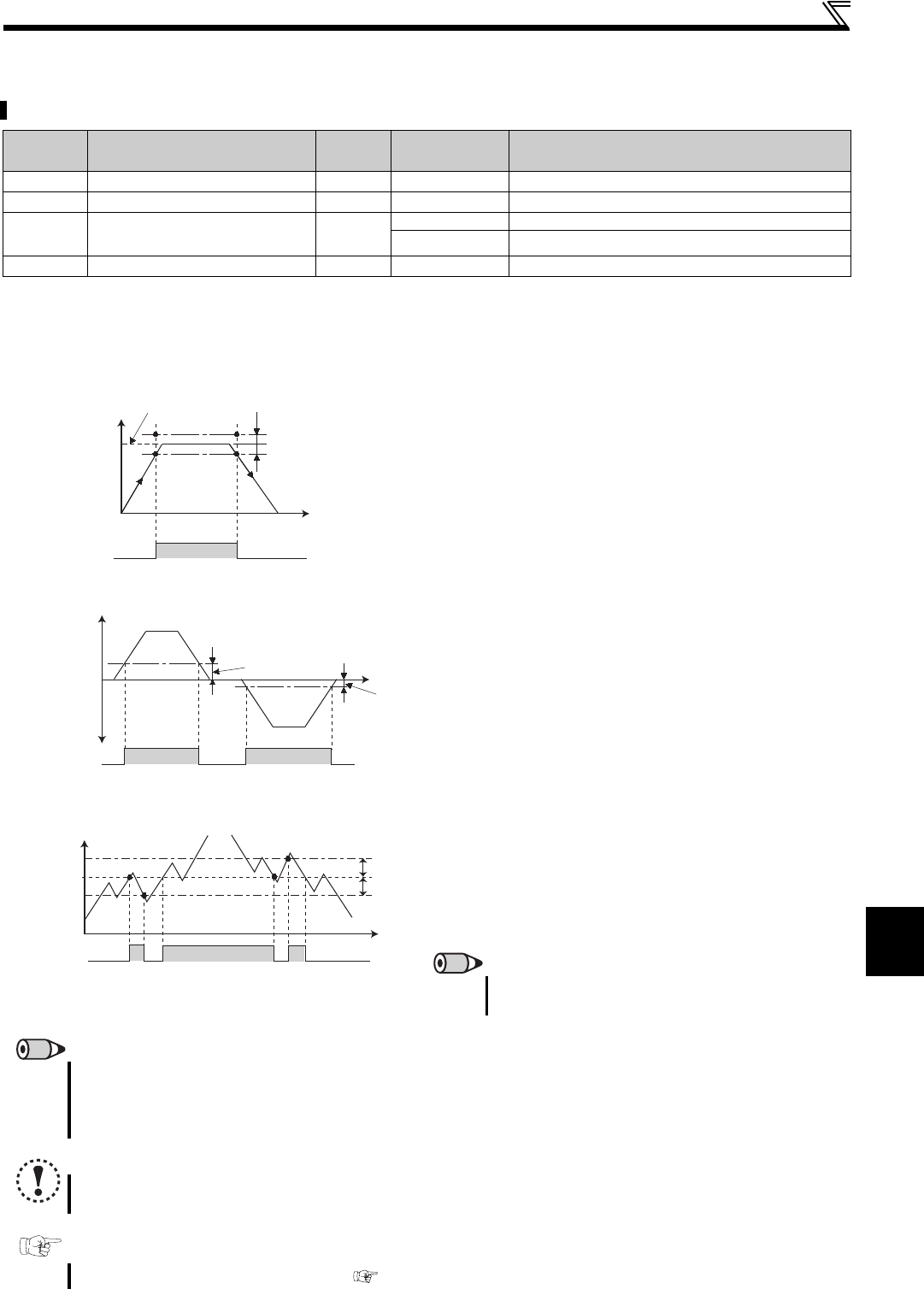
(1) Up-to-speed sensitivity (SU signal, Pr.41)
When the rotation speed reaches the set speed, the up-to-
speed signal (SU) is output.
The Pr.41 value can be adjusted within the range 0% to
100% on the assumption that the set speed is 100%.
This parameter can be used to ensure that the running
speed has been reached to provide the operation start
signal etc. for related equipment.
When using the SU signal, set "1 (positive logic) or 101
(negative logic)" in Pr.190 to Pr.192 (output terminal function
selection) to assign function to the output terminal.
(2) Rotation speed detection (FU signal, Pr.42, Pr.43)
The rotation speed detection signal (FU) is output when the
rotation speed reaches or exceeds the Pr.42 setting.
Speed detection that is dedicated to the reverse operation
can be set by setting detection speed to Pr.43.
When Pr.43 "9999", the Pr.42 setting is used for forward
rotation and the Pr.43 setting is used for reverse rotation.
(3) Speed detection hysteresis (Pr.870)
This function prevents chattering of the speed detection
signals.
When the rotation speed fluctuates, the up-to-speed signal
(SU) and rotation speed detection signal (FU) may repeat
ON/ OFF (chatter). Setting hysteresis to the detected
speed prevents chattering of these signals.
REMARKS
The FU signal is assigned to the terminal FU in the initial setting. The FU signal can also be assigned to the other terminal by
setting "4 (positive logic) or 104 (negative logic)" in any of Pr.190 to Pr.192.
All signals are OFF during zero speed control.
Under position control, the SU signal is invalid.
NOTE
Changing the terminal assignment using Pr.190 to Pr.192 (output terminal function selection) may affect the other
functions. Set parameters after confirming the function of each terminal.
Parameter referred to
Pr.190 to Pr.192 (output terminal function selection) Refer to page 144
Rotation speed
Time
(r/min)
ON
Set speed
Adjustment
range Pr.41
SU
OFFOFF
Output signal
Forward
rotation
Reverse
rotation
Time
ON ONOFF OFFOFF
(r/min)
FU
Pr.43
Pr.42
Rotation speed
Pr.870
Pr.42
Rotation speed
(r/min)
ON
ON
ON
FU
Example of rotation speed detection signal (FU)
OFF OFF
REMARKS
Setting a higher value to this parameter slows the
response of speed detection signals (SU and FU).