



















84
Speed control
(2) Model adaptive speed control (Pr.877 = "2")
The motor's model speed is calculated to feed back the model side speed controller. This model speed is also used
as the actual speed controller command.
The inertia ratio of Pr.880 is used when the model calculates the motor speed or the speed controller calculates the
torque current command value.
The torque current command value of the model side speed controller is added to the output of the actual speed
controller, and the result is used as the iq current control input.
Pr.828 is used for model side speed control (P control), and the first gain in Pr.820 is used for the actual speed
controller.
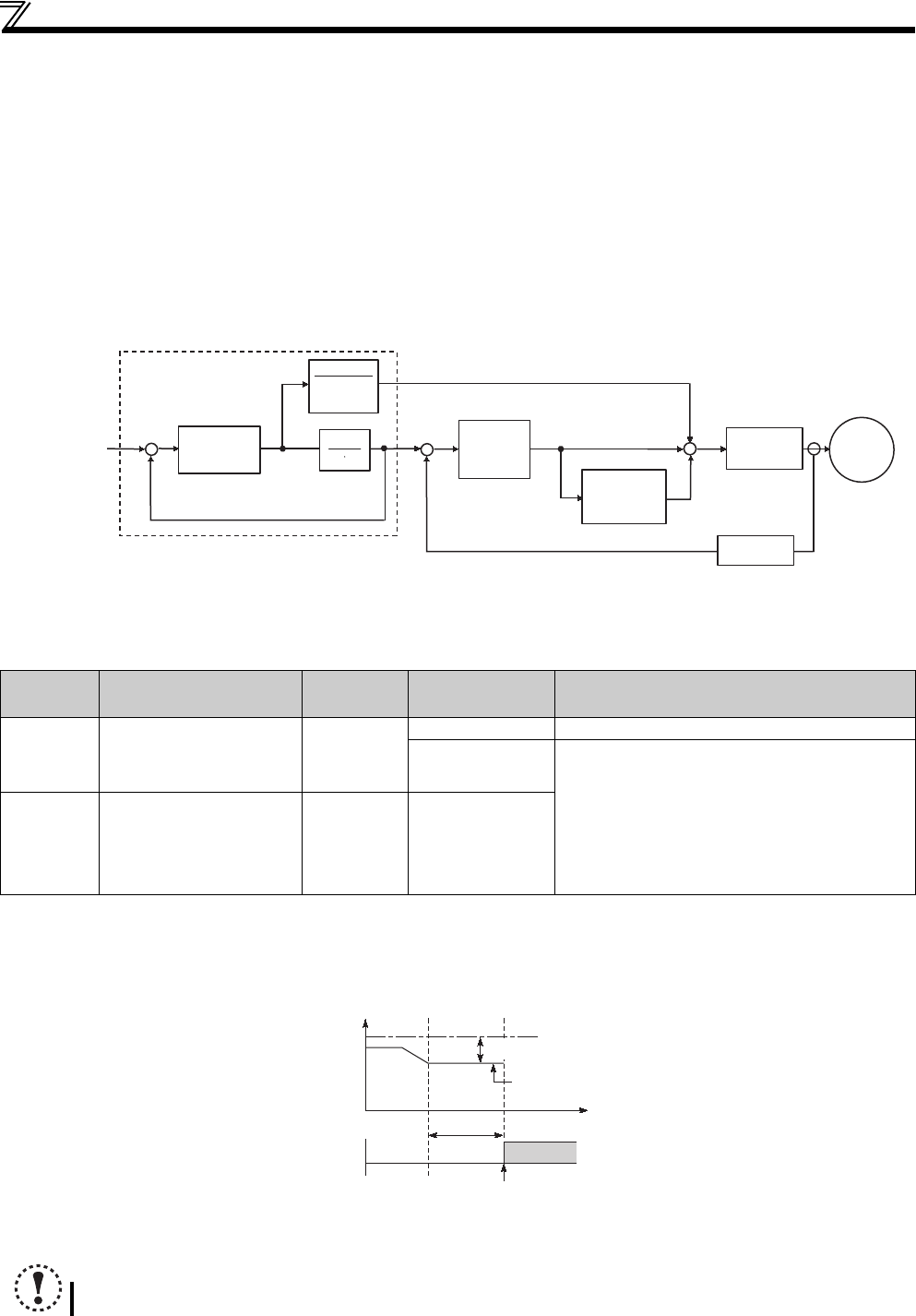
4.4.5 Excessive speed deviation (Pr.285, Pr.853)
When an S-PM geared motor is used, the maximum setting value differs depending on the drive unit capacity. (0.2 to 2.2K: 900 r/min, 3.7K: 600 r/min)
When the deviation between the set frequency and actual speed is large, e.g. too large load torque, this function can cause
the drive unit to provide a speed deviation excessive fault (E.OSD) and come to a trip.
Parameter
number
Name Initial value Setting range Description
285
Excessive speed
deviation detection
speed
9999
9999 Without speed deviation excessive
0 to 360r/min
If the difference (absolute value) between the speed
command value and actual speed during speed
control exceeds the Pr.285 Excessive speed deviation
detection speed for more than the time set in Pr.853
Speed deviation time, speed deviation excessive
occurs and drive unit fault (E. OSD) appears,
resulting in a trip.
853 Speed deviation time
1s 0 to 100s
NOTE
Under position control, speed deviation excess detection is disabled.
Torque
control
Speed
estimator
Speed control
P gain
[Pr.820 ]
Speed control
integral time
[Pr.821 ]
M
Speed command
Actual speed controller
Model speed
calculation
+
-
+
+
+
Model speed
control gain
[Pr.828 ]
1
J s
J
Torque coefficient
(J: [Pr. 880 ])
+
-
Model adaptive speed control
[Block diagram]
(r/min)
Set speed
Actual rotation speed
Time
Speed deviation
excessive fault activated
(E. OSD)
ONOFF
Fault output
(across A-C)
Pr.853
Pr.285
Rotation
speed