



















111
Adjusting the output torque (current) of the motor
4
PARAMETERS
4.6 Adjusting the output torque (current) of the motor
4.6.1 Torque limit (Pr.22, Pr.48, Pr.148, Pr.149, Pr.156, Pr.157)
(1) Block diagram
(2) Setting the torque limit level (Pr.22)
Purpose Parameter to set Refer to page
To limit the output current to avoid
tripping of the drive unit
Torque limit operation
Pr.22, Pr.48, Pr.148, Pr.149,
Pr.156, Pr.157
111
To improve the torque in low-speed
range
PM control torque boost Pr.785
114
This function monitors the output current and automatically changes the rotation speed to prevent the drive unit to trip
due to overcurrent.
Parameter
number
Name
Initial value
Setting range Description
0.75K
or lower
1.5K or
higher
22
Torque limit level
200% 150%
0 Torque limit operation becomes invalid.
0.1 to 200%
The current value at which torque limit operation
will be started.
9999 Torque limit level for analog input
48
Second torque limit
level
9999
0 Torque limit operation becomes invalid.
0.1 to 200% The second torque limit operation level.
9999 Same as Pr.22
148
Torque limit level at
0mA input
150% 0 to 200%
The torque limit operation level can be changed
by the analog signal input to the terminal 4.
149
Torque limit level at
20mA input
200% 0 to 200%
156 Torque limit selection
0 0 to 31, 100, 101
Select whether torque limit will be performed or
not.
157 OL signal output timer
0s
0 to 25s
The output start time of the OL signal output
when torque limit is activated.
9999 Without the OL signal output
The above parameters can be set when Pr.160 Extended function display selection = "0". (Refer to page 182)
This parameter allows its setting to be changed during operation in any operation mode even if "0" (initial value) is set in Pr.77 Parameter write selection.
.......Specifications differ according to the date assembled. Refer to page 316 to check the SERIAL number.
If the output torque (current equivalent to the torque) exceeds
the current level for the torque limit operation, the output torque
is limited by adjusting the output frequency. The torque limit
operation level in such a case is based on the rating torque of
the motor.
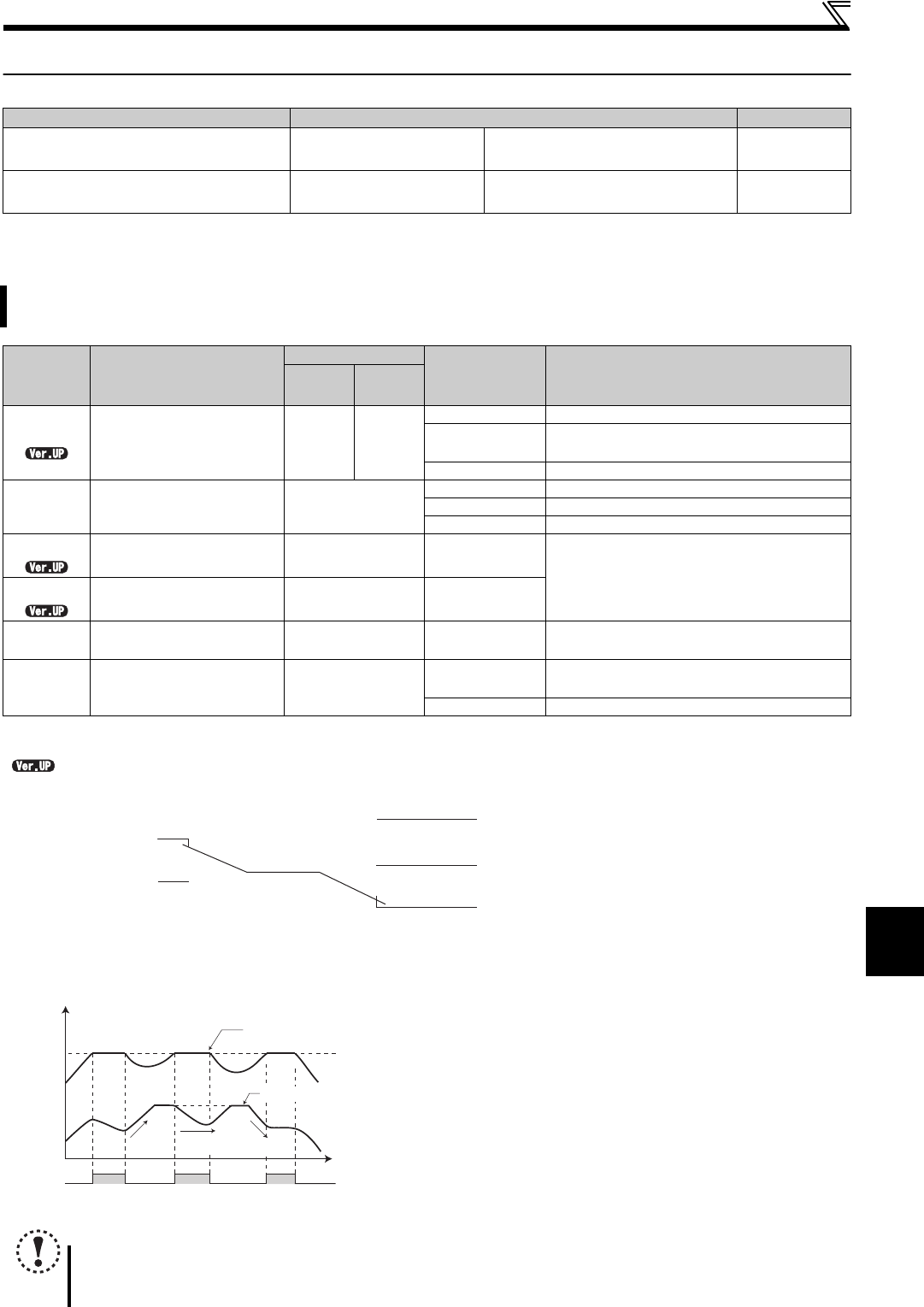
Torque limit operation stops acceleration (makes deceleration)
during acceleration, makes deceleration during constant speed,
and stops deceleration during deceleration.
When torque limit operation is performed, the OL signal is
output.
NOTE
If an overload status lasts long, a drive unit trip (e.g. electronic thermal relay function (E.THM)) may occur.
If the speed drops to 18r/min or lower due to the torque limit operation and stays there for 3s, the fault indication
(E.OLT) appears, and the drive unit outputs are shut off.
Torque limit level
Torque limit operation becomes invalid
RT=ON
Pr.22 (Pr.48)=0
Pr.22 (Pr.48)
= 0.1 to 200%
P
r.48
P
r.22
RT=OFF
Pr.22=9999
Torque limit level using analog input (terminal 4)
Torque limit example
P
r.22
OL
Output torque
Acceleration
Time
Constant
speed
Rotation speed
Deceleration