



















181
Misoperation prevention and parameter setting restriction
4
PARAMETERS
4.16.2 Parameter write disable selection (Pr.77)
(1) Write parameters only during stop (setting "0" initial value)
Parameters can be written only during a stop in the PU operation mode.
The shaded parameters in the parameter list (page 52) can always be written regardless of the operation mode and
operating status.
(2) Inhibit parameter write (setting "1")
(3) Write parameters during operation (setting "2")
Parameters can always be written.
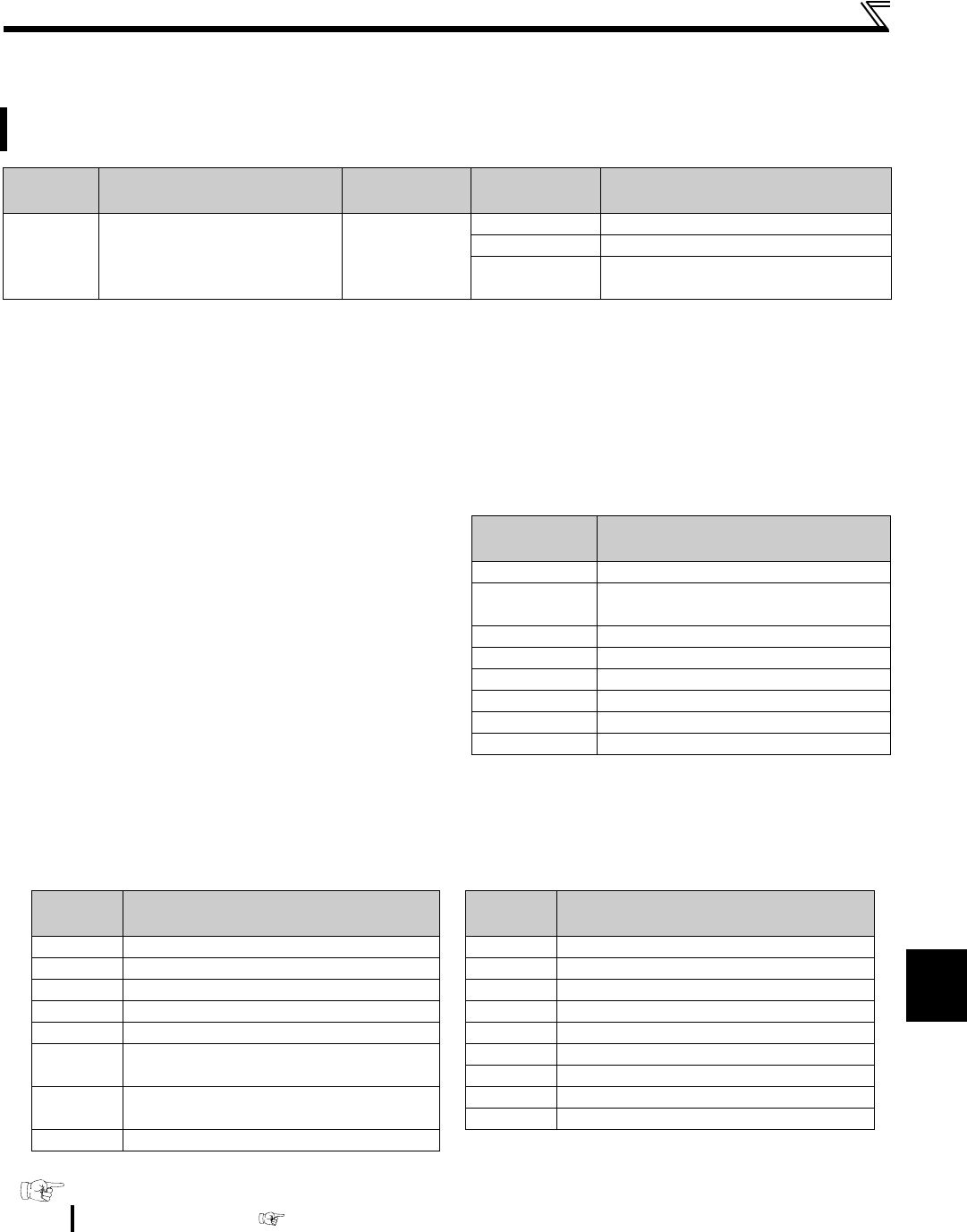
The following parameters cannot be written when the drive unit is running if Pr.77 = "2". Stop the drive unit when changing
their parameter settings.
You can select whether write to various parameters can be performed or not. Use this function to prevent parameter
values from being rewritten by misoperation.
Parameter
number
Name Initial value Setting range Description
77 Parameter write selection
0
0 Write is enabled only during a stop.
1 Parameter can not be written.
2
Parameter write is enabled in any operation
mode regardless of operation status.
The above parameters can be set when Pr.160 Extended function display selection = "0". (Refer to page 182)
Pr.77 can always be set independently from the operation mode and operation status.
Parameter write is not enabled.
(Read is enabled.)
Parameter clear and all parameter clear cannot be
performed, either.
The parameters given on the right can be written if Pr.77 =
"1".
Parameter
number
Name
22 Torque limit level
75
Reset selection/disconnected PU detection/
PU stop selection
77 Parameter write selection
79 Operation mode selection
160 Extended function display selection
296 Password lock level
297 Password lock/unlock
997 Fault initiation
Parameters referred to
Pr.79 Operation mode selection Refer to page 186
Parameter
number
Name
40 RUN key rotation direction selection
48 Second torque limit level
79 Operation mode selection
178 to 184 (Input terminal function selection)
190 to 192 (Output terminal function selection)
420
Command pulse multiplication numerator
(electronic gear numerator)
421
Command pulse multiplication denominator
(electronic gear denominator)
463 Position control rotation direction selection
535 Position control terminal input selection
537 Roll feed mode selection
658 Wiring resistance
736 Electromagnetic brake interlock time
785 PM control torque boost
795 DC brake torque boost
800 Control method selection
998 PM parameter initialization
999 Automatic parameter setting
Parameter
number
Name