



















95
4
PARAMETERS
Position control
4.5.4 Simple positioning function by point tables (Pr.4 to 6, Pr.24 to Pr.27, Pr.465 to
Pr.478, Pr.508, Pr.509, Pr.525 to Pr.531, Pr.537, Pr.578 to Pr.591)
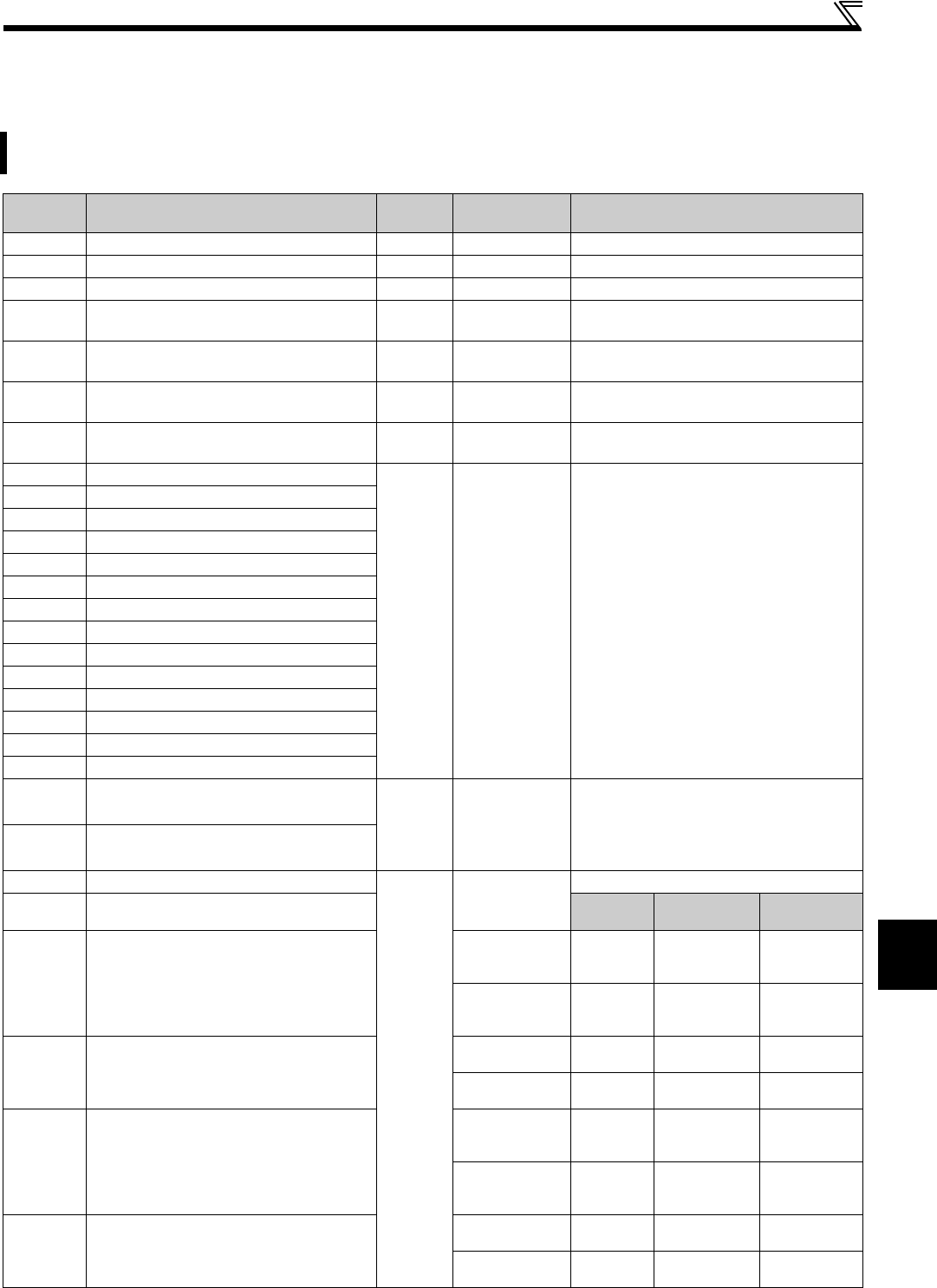
Set positioning parameters such as the number of pulses (position) and acceleration/deceleration time in advance to
create point tables (point table method). Positioning operation is performed by selecting the point table.
Parameter
number
Name
Initial
value
Setting
range
Description
4 Multi-speed setting (high speed)
3000r/min 0 to 4800r/min Maximum speed at the first positioning
5 Multi-speed setting (middle speed)
1500r/min 0 to 4800r/min Maximum speed at the second positioning
6 Multi-speed setting (low speed)
300r/min 0 to 4800r/min Maximum speed at the third positioning
24 Multi-speed setting (speed 4)
9999
0 to 4800r/min
,
9999
Maximum speed at the forth positioning
When Pr.24 = "9999", the Pr.6 setting is used.
25 Multi-speed setting (speed 5)
9999
0 to 4800r/min
,
9999
Maximum speed at the fifth positioning
When Pr.25 = "9999", the Pr.6 setting is used.
26 Multi-speed setting (speed 6)
9999
0 to 4800r/min
,
9999
Maximum speed at the sixth positioning
When Pr.26 = "9999", the Pr.5 setting is used.
27 Multi-speed setting (speed 7)
9999
0 to 4800r/min
,
9999
Maximum speed at the seventh positioning
When Pr.27 = "9999", the Pr.6 setting is used.
465 First target position lower 4 digits
0 0 to 9999
Set the target position data before the
electronic gear.
The data consists of the upper data and lower
data.
466 First target position upper 4 digits
467
Second target position lower 4 digits
468
Second target position upper 4 digits
469 Third target position lower 4 digits
470 Third target position upper 4 digits
471
Fourth target position lower 4 digits
472
Fourth target position upper 4 digits
473 Fifth target position lower 4 digits
474 Fifth target position upper 4 digits
475 Sixth target position lower 4 digits
476 Sixth target position upper 4 digits
477
Seventh target position lower 4 digits
478
Seventh target position upper 4 digits
508
Home position shift amount lower
4 digits
0 0 to 9999 Set an offset value to shift the home position.
509
Home position shift amount upper
4 digits
525 First positioning sub-function
10
Set a function of the target position data.
526 Second positioning sub-function
Sign
Command
method
Continuous
operation
527 Third positioning sub-function
0Plus
Absolute
position
command
Independent
1Plus
Absolute
position
command
Continuous
528 Fourth positioning sub-function
10 Plus
Increment
command
Independent
11 Plus
Increment
command
Continuous
529 Fifth positioning sub-function
100 Minus
Absolute
position
command
Independent
101 Minus
Absolute
position
command
Continuous
530 Sixth positioning sub-function
110 Minus
Increment
command
Independent
111 Minus
Increment
command
Continuous