



















220
Communication operation and setting
[Drive unit status monitor]
The signal within parentheses is the default setting. Definitions change according to the Pr.190 to Pr.192 (output terminal function selection).
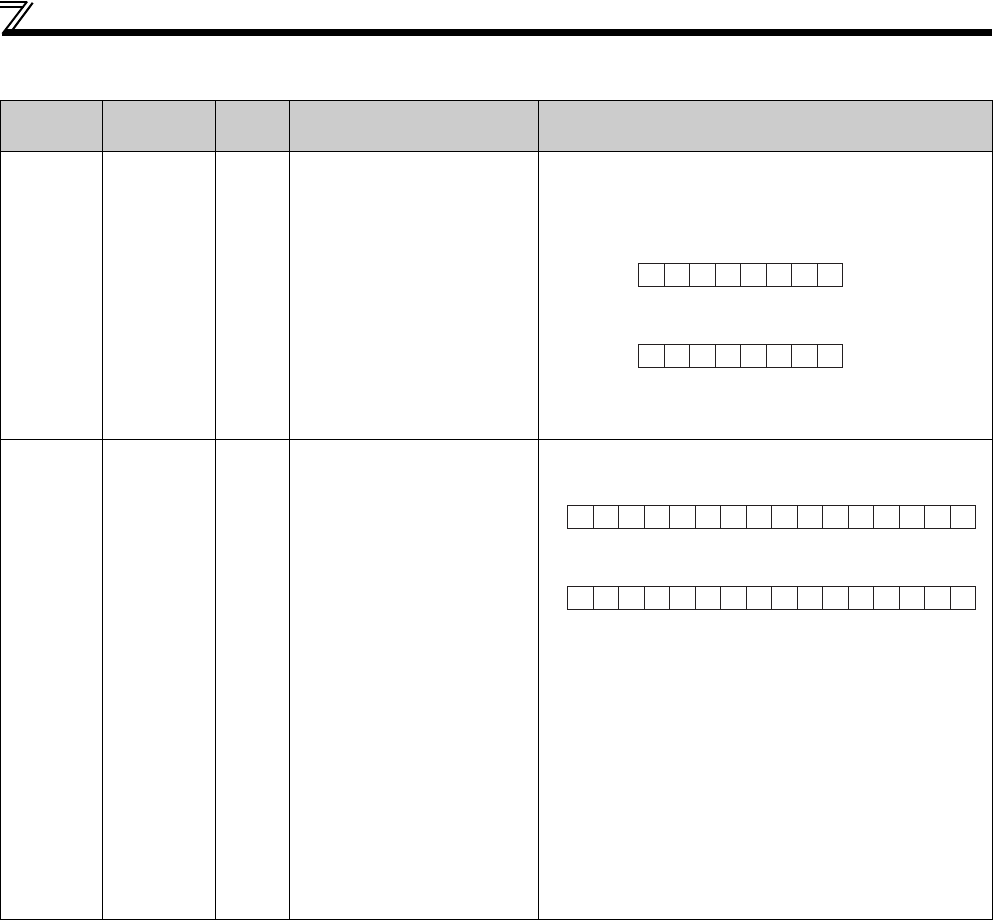
Item
Instruction
Code
Bit
Length
Description Example
Drive unit
status
monitor
H7A 8 bits
b0: RUN (Drive unit running
(Variable))
b1: During forward rotation
(Fixed)
b2: During reverse rotation
(Fixed)
b3: Up-to-speed (Fixed)
b4: Overload (Fixed)
b5:
b6: FU (speed detection
(Variable))
b7: ABC (fault (Variable))
Drive unit
status
monitor
(expansion)
H79 16 bits
b0: RUN (drive unit running
(Variable))
b1: During forward rotation
(Fixed)
b2: During reverse rotation
(Fixed)
b3: Up-to-speed (Fixed)
b4: Overload (Fixed)
b5:
b6: FU (speed detection
(Variable))
b7: ABC (fault (Variable))
b8:
b9:
b10:
b11:
b12:
b13:
b14:
b15: Fault occurrence (Fixed)
00000010
b7 b0
[Example 1] H02... During forward rotation
[Example 2] H80... Stop at fault occurrence
10000000
b7 b0
00000010
b0
00000000
b15
[Example 1] H0002... During forward rotation
10000000
b0
10000000
b15
[Example 2] H8080... Stop at fault occurrence