79
Speed control
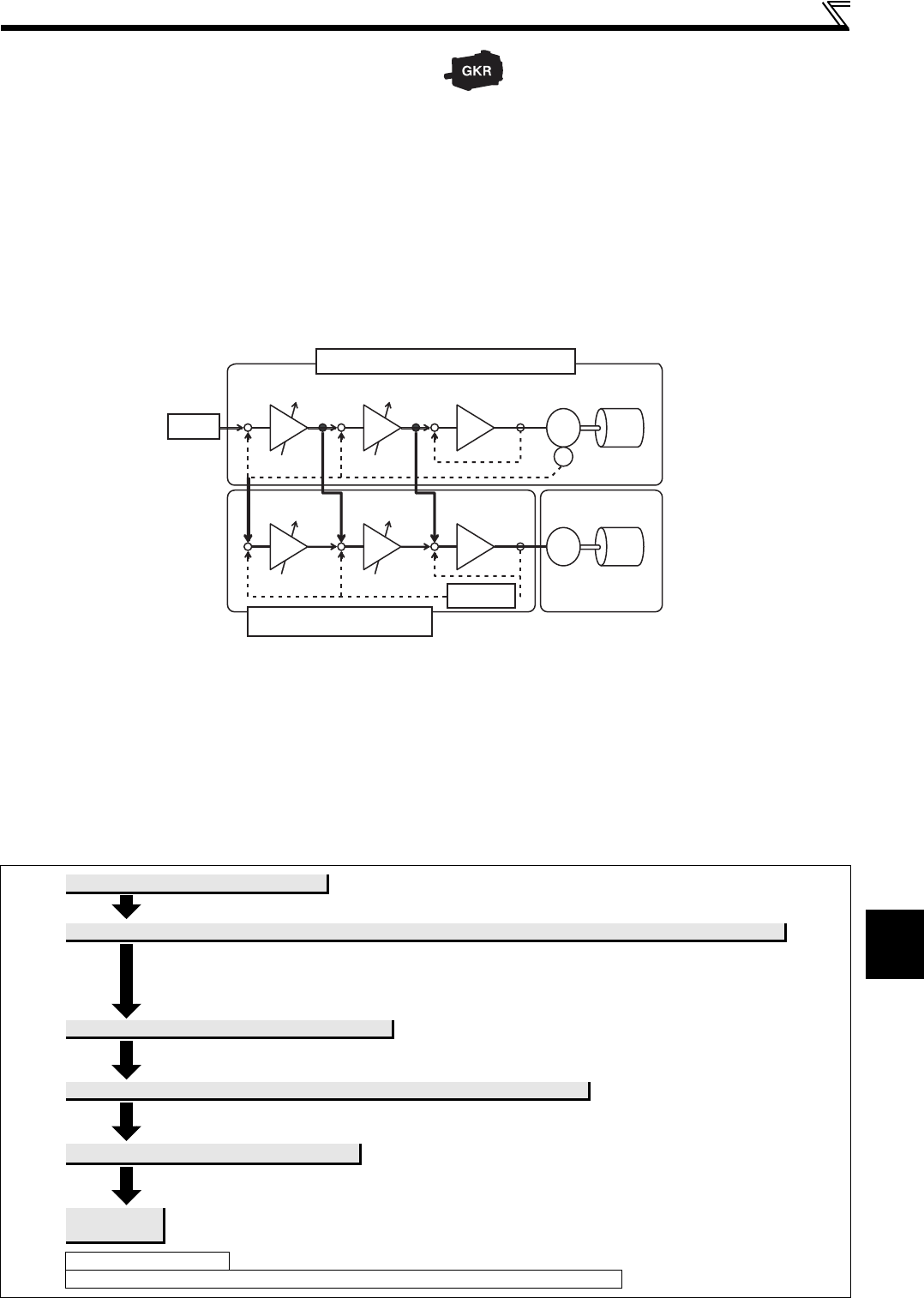
(2) Model adaptive control and feed forward control
The model adaptive control is a control logic based on the load inertia setting to set gains individually for the ideal model
section and the actual loop section, achieving a fast-responsing and mechanically stable setting.
The ideal model section is not affected by disturbances or backlashes of the machine. Thus, even with the fast-response
setting of each gain, excellent characteristics are seen.
The actual loop section (disturbance suppression section) is designed based on PI control. If a difference is caused between
the model position/speed created at the ideal model section and the actual motor position/speed due to disturbance torque, a
torque command is output from the actual loop section to follow the model position/speed. To increase the suppression effect
against disturbances, set higher gains. However, setting the gains too high may cause vibration.
Because the operation in the ideal model section is based on the load inertia, proper control may not be performed when the
load inertia setting is different from the actual load inertia.
Under position feed forward control, a speed command necessary for tracking positions is calculated in advance and added to
the control commands. Under speed feed forward control, a torque current command necessary for acceleration/deceleration
is calculated in advance and added to the control commands. The response that cannot be improved by only usual gain
adjustment can be improved by using feed forward control.
A load inertia setting different from the actual load inertia, or too high feed forward gain settings may cause vibrations or
improper control.
4.4.2 Setting procedure of speed control
Perform secure wiring. (Refer to page 14)
Change the parameter settings to the initial value in accordance with the applied motor. (Pr.998) (Refer to page 73)
"3024": Parameter settings for an MM-GKR motor (rotations per minute)
"3124": Parameter settings for an MM-GKR motor (frequency)
"6004": Parameter settings for an S-PM geared motor (rotations per minute)
"6104": Parameter settings for an S-PM geared motor (frequency)
Select the control method. (Pr.800) (Refer to page 75)
Set Pr.800="10" (initial value) to enable speed control.
Set parameters such as the acceleration/deceleration time and multi-speed setting.
Set parameters such as the acceleration/deceleration time and multi-speed setting
as required.
Set the operation command. (Refer to page 186)
Select the start command and speed command.
Test run
As required
Adjust the speed control gain. (Pr.820, 821) (Refer to page 80)
M
M
Position
Speed
Current
Position
Speed
Current
Position gain 1
Position gain 2 Speed gain 2
Load
Actual motor
Load inertia ratio
Command
Load
Ideal motor
Speed gain 1
Ideal model section (set command response.)
Actual loop section
(disturbance suppression section)
Speed/position-
estimation section




































































































































































































































































































































