



















83
4
PARAMETERS
Speed control
4.4.4 Speed feed forward control, model adaptive speed control
(Pr.828, Pr.877 to Pr.881)
The above parameters are available only with MM-GKR motors.
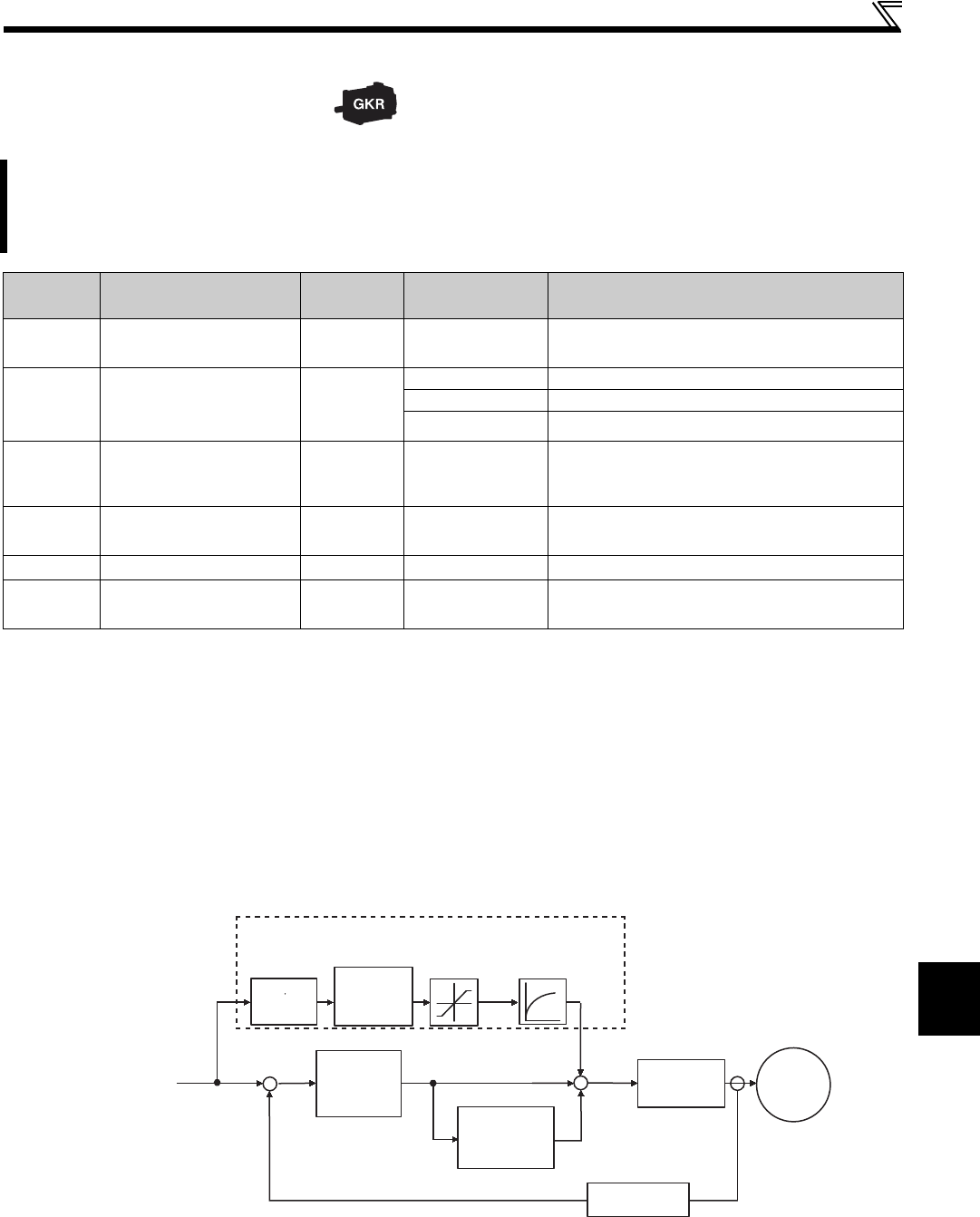
(1) Speed feed forward control (Pr.877 = "1")
Calculate required torque in response to the acceleration/deceleration command for the inertia ratio set in Pr.880 and
generate torque immediately.
When the speed feed forward gain is 100%, the calculation result of the speed feed forward is applied as is.
If the speed command changes suddenly, large torque is generated due to the speed feed forward calculation. The
maximum value of the speed feed forward is limited using Pr.879.
Using Pr.878, the speed feed forward result can be dulled by the primary delay filter.
By making parameter setting, select the speed feed forward control or model adaptive speed control.
The speed feed forward control enhances the trackability of the motor in response to a speed command change.
The model adaptive speed control enables individual adjustment of speed trackability and motor disturbance torque
response.
Parameter
number
Name Initial value Setting range Description
828
Model speed control
gain
60% 0 to 1000%
Set the gain for model speed controller.
100% is equivalent to 100 rad/s.
877
Feed forward control/
model adaptive control
selection
0
0 Normal speed control is exercised.
1 Speed feed forward control is exercised.
2 Model adaptive speed control is enabled.
878
Speed feed forward
filter
0s 0 to 1s
Set the primary delay filter for the speed feed forward
result calculated using the speed command and load
inertia ratio.
879
Speed feed forward
torque limit
150% 0 to 400%
Limits the maximum value of the speed feed forward
torque.
880 Load inertia ratio
7 times 0 to 200 times Set the load inertia ratio to the motor.
881
Speed feed forward
gain
0% 0 to 1000% Set the feed forward calculation result as a gain.
J s
[Pr.880 ]
[Pr.878 ]
Speed feed
forward filter
[Pr.879 ]
Speed feed
forward torque
limit
Speed feed
forward gain
[Pr.881 ]
Speed feed forward control
Torque control
Speed estimator
Speed control
P gain
[Pr.820 ]
Speed control
integral time
[Pr.821 ]
M
Actual speed controller
+
-
+
+
+
Speed command
Load inertia ratio
[Block diagram]