



















231
Communication operation and setting
4
PARAMETERS
(6) Modbus registers
System environment variable
The communication parameter values are not cleared.
For write, set the data as a control input instruction.
For read, data is read as a drive unit operating status.
For write, set data as the operation mode setting.
For read, data is read as the operation mode status.
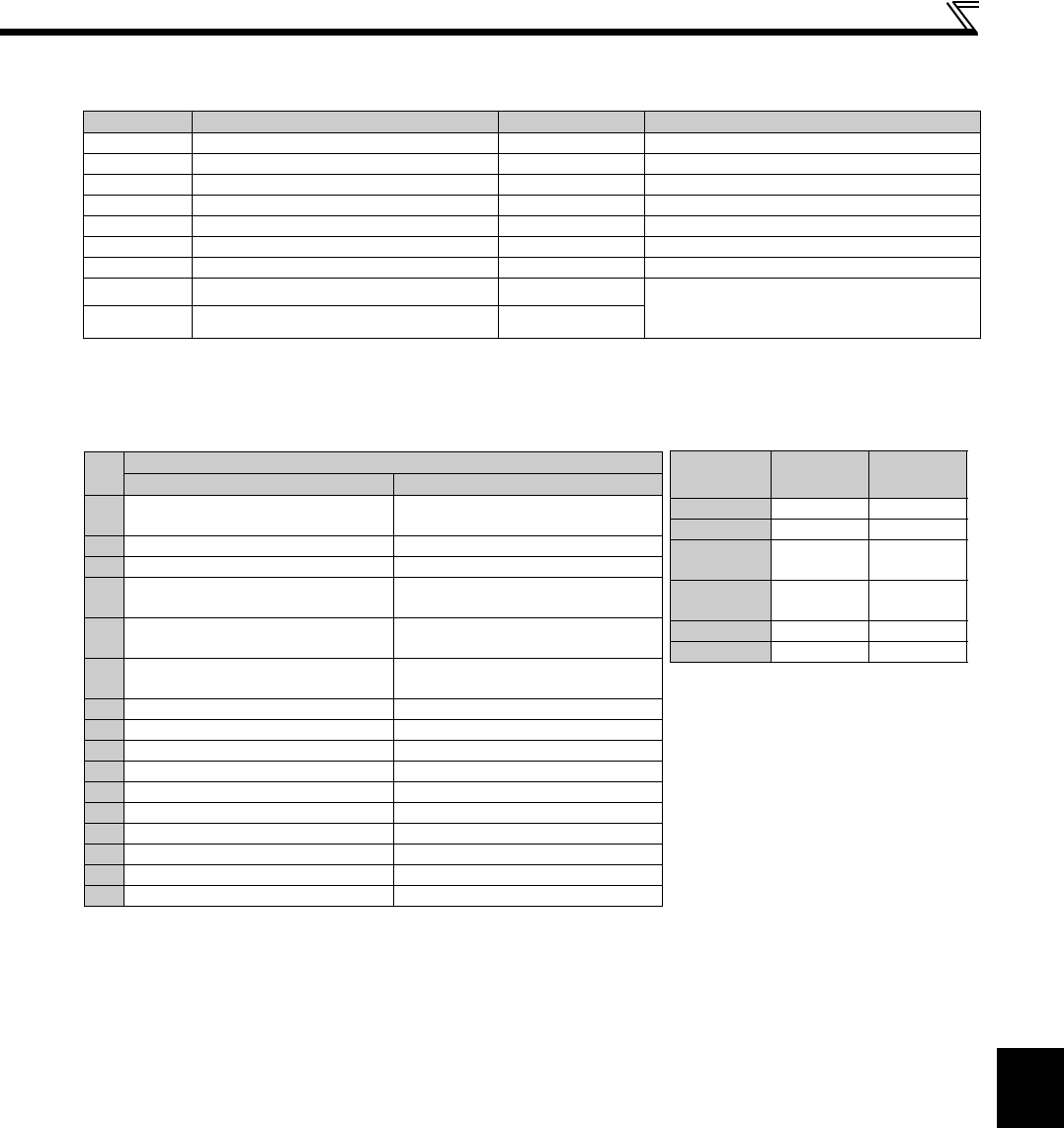
Register Definition Read/write Remarks
40002 Drive unit reset Write Any value can be written
40003 Parameter clear Write Set H965A as a written value.
40004 All Parameter clear Write Set H99AA as a written value.
40006 Parameter clear Write Set H5A96 as a written value.
40007 All parameter clear Write Set HAA99 as a written value.
40009
Drive unit status/control input instruction
Read/Write See below.
40010 Operation mode/drive unit setting Read/Write See below.
40014 Running speed (RAM value) Read/Write
According to the Pr.37 settings, the frequency
and selectable speed are in 1r/min
increments.
40015 Running speed (EEPROM value) Write
<Drive unit status/control input instruction>
The signal is the default setting. The description changes depending on the setting of Pr.180 to Pr.184 (input terminal function selection).
(Refer to page 138)
Each assigned signal is valid or invalid depending on NET. (Refer to page 195)
The signal is the default setting. Definitions change according to the Pr.190 to Pr.192 (output terminal function selection). (Refer to page 144)
Bit
Definition
Control input instruction Drive unit status
0 Stop command (Fixed)
RUN (Drive unit running
(Variable))
1 Forward rotation command (Fixed) During forward rotation (Fixed)
2 Reverse rotation command (Fixed) During reverse rotation (Fixed)
3
RH (high-speed operation
command (Variable))
Up-to-speed (Fixed)
4
RM (middle-speed operation
command (Variable))
Overload (Fixed)
5
RL (low-speed operation command
(Variable))
0
6 0 FU (speed detection) (Variable))
7 Second function selection (Fixed) ABC (fault (Variable))
8 Current input selection (Fixed) 0
90 0
10 MRS (output stop (Variable)) 0
11 0 0
12 RES (reset (Variable)) 0
13 0 0
14 0 0
15 0 Fault occurrence (Fixed)
<Operation mode/drive unit setting>
The restrictions depending on the
operation mode changes according to the
computer link specifications.
Mode
Read
Value
Written
Value
EXT H0000 H0010
PU H0001
EXT
JOG
H0002
PU
JOG
H0003
NET H0004 H0014
PU+EXT H0005