



















145
Function assignment of external terminal and control
4
PARAMETERS
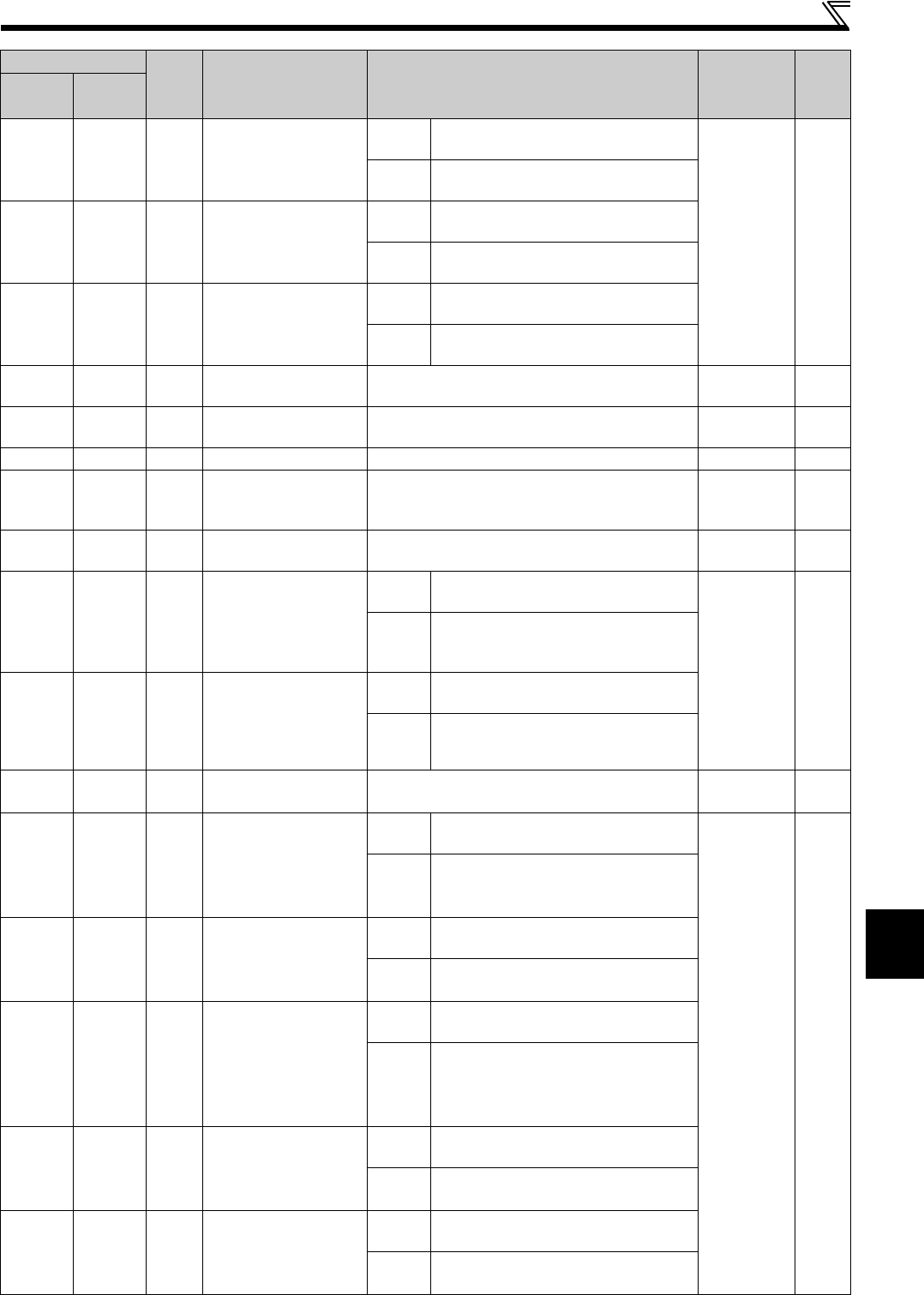
14 114 FDN PID lower limit
Speed
control
Output when the feedback value falls
below the lower limit of PID control.
Pr.127 to
Pr.134
235
Position
control
15 115 FUP PID upper limit
Speed
control
Output when the feedback value rises
above the upper limit of PID control
Position
control
16 116 RL
PID forward/reverse
rotation output
Speed
control
Output when forward rotation is performed
in PID control.
Position
control
21 121 MBR
Electromagnetic brake
interlock
Output to open the electromagnetic brake. Pr.736 135
24 124 LP Stroke limit warning
Output when the LSP or LSN signal is OFF (normally
closed input).
Pr.464, Pr.535 101
25 125 FAN Fan fault output Output at the time of a fan fault. Pr.244 244
26 126 FIN
Heatsink overheat pre-
alarm
Output when the heatsink temperature reaches about
85% of the heatsink overheat protection providing
temperature.
274
33 133 RY2 Operation ready 2 Output during pre-excitation and operation. Pr.10, Pr.11
132,
147
36 136 Y36 In-position
Speed
control
Pr.426, Pr.506,
Pr.507, Pr.510,
Pr.511, Pr.530
109
Position
control
Output when the number of droop pulses
drops below the setting of Pr.426 In-
position width.
38 138 MEND Travel completed
Speed
control
Position
control
Output when the in-position signal (Y36) is
ON and the position command creating
signal (PBSY) is OFF.
47 147 PID
During PID control
activated
Output during PID control.
Pr.127 to
Pr.134
235
55 155 CPO Rough match
Speed
control
Pr.426, Pr.506,
Pr.507, Pr.510,
Pr.511, Pr.530
109
Position
control
Output when the remaining command
distance falls below the setting of Pr.507
Rough match output range.
56 156 ZA
Home position return
failure warning
Speed
control
Position
control
Output when a home position return failure
occurs.
60 160 FP Position detected
Speed
control
Position
control
Output when the current position exceeds
the total of Pr.510 Position detection lower 4
digits and Pr.511 Position detection upper 4
digits.
61 161 PBSY
Position command
creating
Speed
control
Position
control
Output when the position command is
being created.
63 163 ZP
Home position return
completed
Speed
control
Position
control
Output after home position return is
completed.
Setting
Signal Function Operation
Related
parameter
Refer
to
page
Positive
logic
Negative
logic