



















96
Position control
(1) Point table setting (Pr.4 to 6, Pr.24 to Pr.27, Pr.465 to Pr.478, Pr.525 to Pr.531, Pr.537, Pr.578 to Pr.591)
Assign the target position, speed, and acceleration/deceleration time to the point tables and select the tables using the
RH, RM, and RL signals.
Position commands are accepted after the home position return operation is completed. New position data are not accepted during home position return
operation.
The maximum speed does not exceed a speed equivalent to the speed command set in Pr.1 Maximum setting. The Pr.2 Minimum setting is ignored.
During position control, acceleration/deceleration pattern is always the liner acceleration/deceleration, and the Pr.29 Acceleration/deceleration pattern selection
setting is ignored.
Even when the RT signal is input, this setting is applied to the operation (the second deceleration time is ignored).
If the acceleration/deceleration time setting is 12r/min/1s or lower, the slope of 12r/min/1s is applied to acceleration/deceleration.
531 Seventh positioning sub-function
10
0Plus
Absolute
position
command
Independent
10 Plus
Increment
command
Independent
100 Minus
Absolute
position
command
Independent
110 Minus
Increment
command
Independent
537 Roll feed mode selection
0
0
Point table position control based on the
absolute position
1
Point table position control in the roll feed mode
578 First positioning acceleration time
5s 0.01 to 360s
Set the basis of acceleration/deceleration
time in Pr.20 Acceleration/deceleration reference
speed.
Set acceleration/deceleration time within the
range of "stop" to the speed change time set
in Pr.20.
579 First positioning deceleration time
580
Second positioning acceleration time
581
Second positioning deceleration time
582 Third positioning acceleration time
583 Third positioning deceleration time
584
Fourth positioning acceleration time
585
Fourth positioning deceleration time
586 Fifth positioning acceleration time
587 Fifth positioning deceleration time
588 Sixth positioning acceleration time
589 Sixth positioning deceleration time
590
Seventh positioning acceleration time
591
Seventh positioning deceleration time
The above parameters can be set when Pr.160 Extended function display selection = "0". (Refer to page 182)
When a value exceeding 3000 r/min is set, the rotation speed will be limited at 3000 r/min.
Also, when an S-PM geared motor is used, the maximum setting value differs depending on the drive unit capacity. (0.2 to 2.2K: 12000 r/min, 3.7K: 8000
r/min)
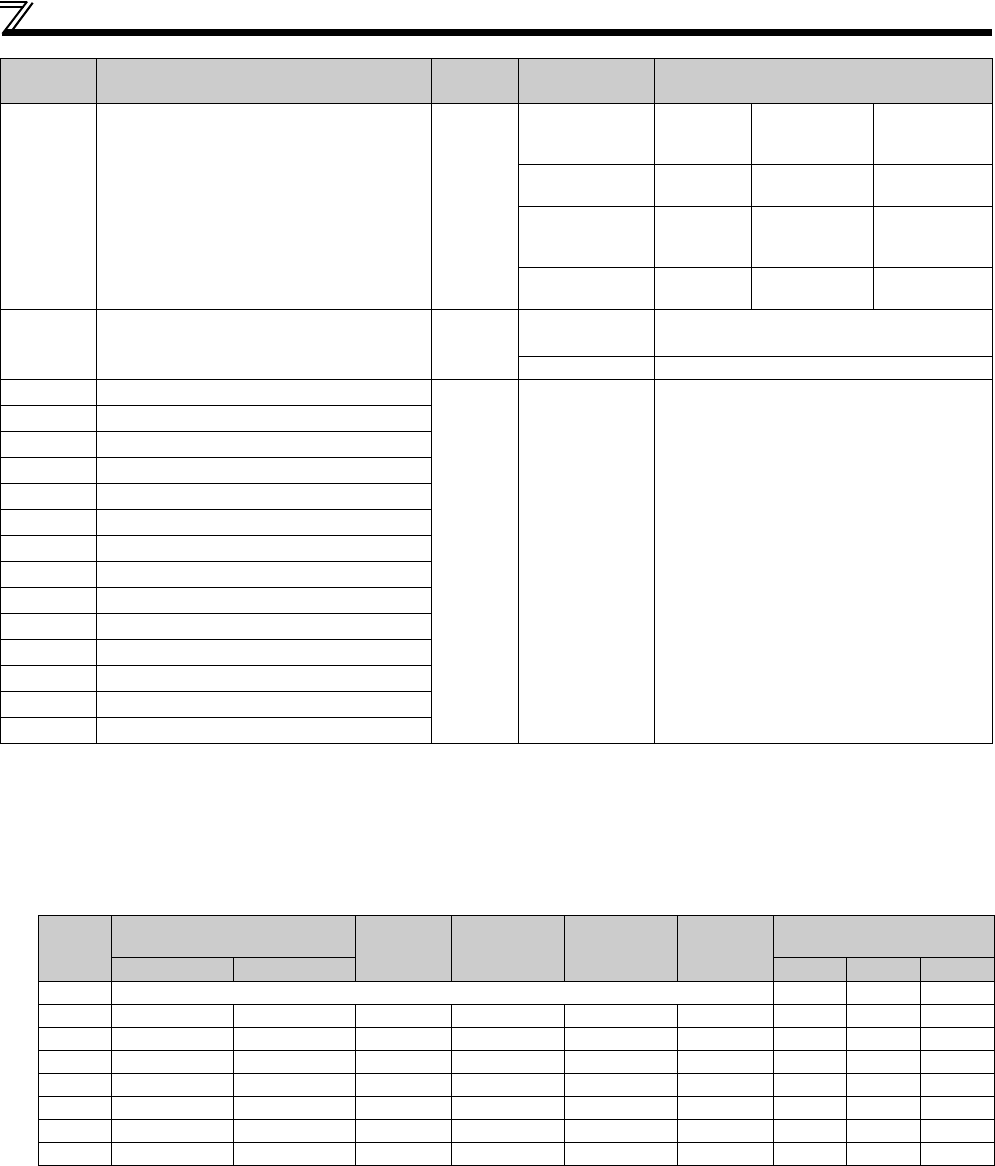
Point
table
Position data
[Before electronic gear]
Maximum
speed
Acceleration
time
Acceleration
time
Auxiliary
function
Table selection signal
Upper Lower RH RM RL
0 Home position return mode
1 Pr.466 Pr.465 Pr.4 Pr.578 Pr.579 Pr.525
2 Pr.468 Pr.467 Pr.5 Pr.580 Pr.581 Pr.526
3 Pr.470 Pr.469 Pr.6 Pr.582 Pr.583 Pr.527
4 Pr.472 Pr.471 Pr.24 Pr.584 Pr.585 Pr.528
5 Pr.474 Pr.473 Pr.25 Pr.586 Pr.587 Pr.529
6 Pr.476 Pr.475 Pr.26 Pr.588 Pr.589 Pr.530
7 Pr.478 Pr.477 Pr.27 Pr.590 Pr.591 Pr.531
Parameter
number
Name
Initial
value
Setting
range
Description