



















241
Special operation and speed control
4
PARAMETERS
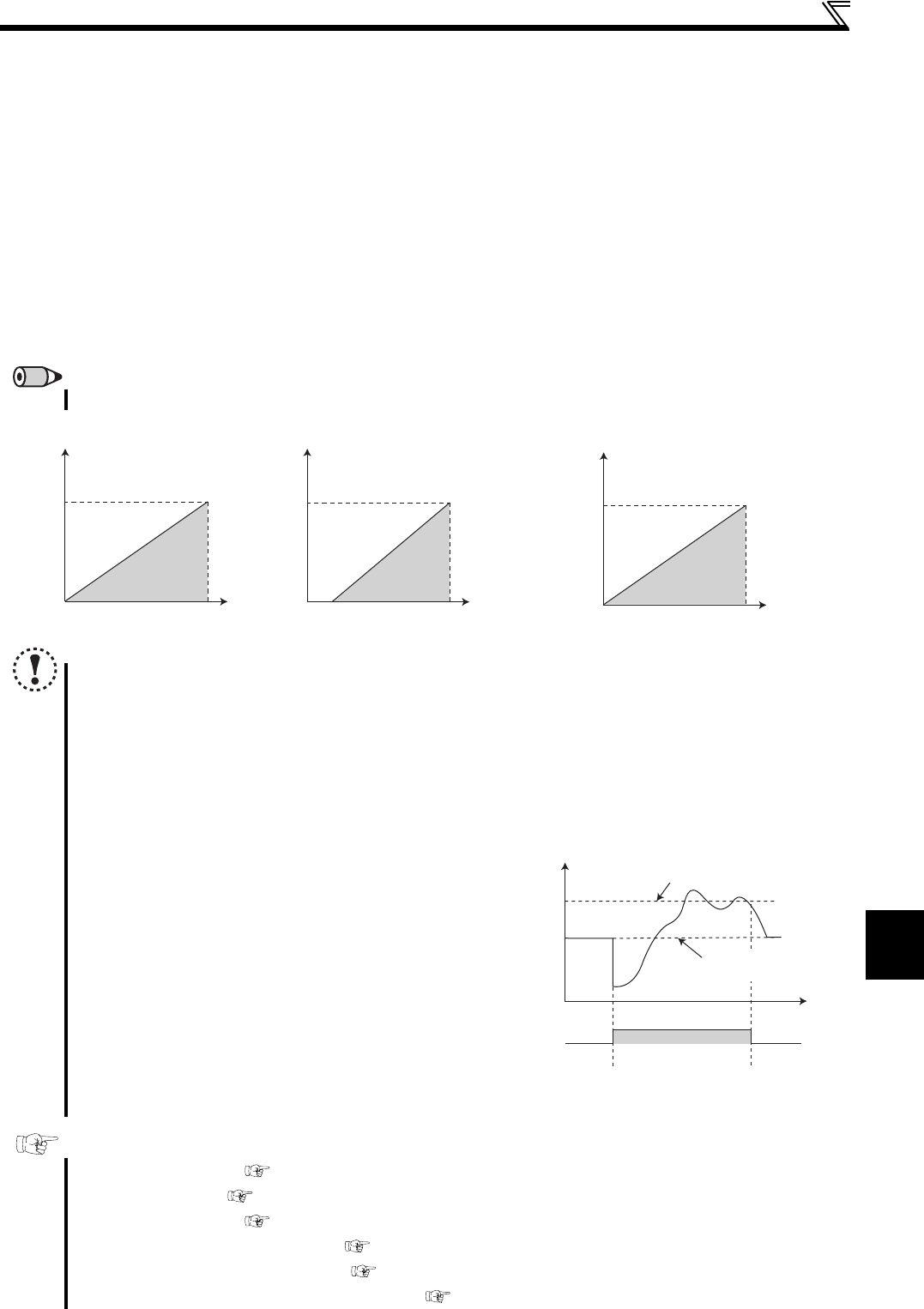
<Set point input calibration>
1. Apply the input voltage of 0% set point setting (e.g. 0V) across terminals 2-5.
2. Enter in C2 (Pr.902) the speed which should be output by the drive unit at the deviation of 0% (e.g. 0r/min).
3. In C3 (Pr.902), set the voltage value at 0%.
4. Apply the voltage of 100% set point (e.g. 5V) across terminals 2-5.
5. Enter in Pr.125 the speed which should be output by the drive unit at the deviation of 100% (e.g. 3000r/min).
6. In C4 (Pr.903), set the voltage value at 100%.
<Measured value calibration>
1. Apply the input current of 0% measured value (e.g. 4mA) across terminals 4-5.
2. Make calibration using C6 (Pr.904).
3. Apply the input current of 100% measured value (e.g. 20mA) across terminals 4-5.
4. Make calibration using C7 (Pr.905).
The results of the above calibration are as shown below:
REMARKS
The speed set in C5 (Pr.904) and Pr.126 should be the same as set in C2 (Pr.902) and Pr.125.
NOTE
Under position control, PID control is invalid.
If the RH, RM, RL signal (multi-speed) or JOG signal (Jog operation2) (Jog operation) is entered with the X14 signal
ON, PID control is stopped and multi-speed or Jog operation started.
When Pr.79 Operation mode selection ="6" (switchover mode), PID control is invalid.
Changing the terminal function using any of Pr.178 to Pr.184, Pr.190 to Pr.192 may affect the other functions. Set
parameters after confirming the function of each terminal.
When PID control is selected, the minimum speed is the speed set in Pr.902 and the maximum speed is the speed set
in Pr.903.
(Pr.1 Maximum setting and Pr.2 Minimum setting are also valid.)
The remote operation function is invalid during PID operation.
When the control is switched to PID control during normal
operation, the speed command value calculated by PID
operation using 0r/min as standard is used without the speed
during the operation.
Parameters referred to
Pr.59 Remote function selection Refer to page 122
Pr.73 Analog input selection Refer to page 168
Pr.79 Operation mode selection Refer to page 186
Pr.178 to Pr.184 (input terminal function selection) Refer to page 138
Pr.190 to Pr.192 (output terminal function selection) Refer to page 144
C2(Pr.902) to C7(Pr.905) Speed setting voltage (current) bias/gain Refer to page 173
100
0
0 5 (V)
(%)
[Set point setting]
100
0
020
(mA)
(%)
[Measured value]
4
3000
0
0 100
Deviation (%)
[Manipulated variable]
Manipulated
variable(r/min)
PID action
Speed
command
PID set point
Speed command
during normal operation
ON
Operation when control is switched to PID control
during normal operation
Normal
operation
PID operation
Normal
operation